Chapter: Electrical Engineering and Instrumentation : DC Machines
Speed Control of DC Motors
Speed Control of DC Motors
1. DC shunt motor
i. Flux control
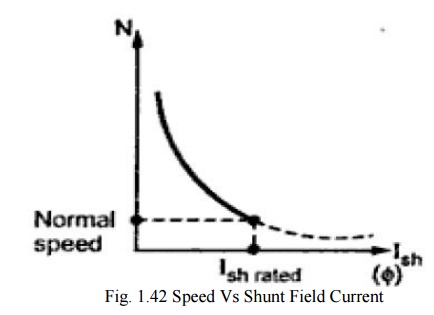
As speed is inversely proportional to the flux.
The flux is dependent on the current through the shunt field winding. Thus flux can be controlled by adding a rheostat (variable resistance in series with the shunt field winding as shown in above figure.
At the beginning the rheostat is kept at minimum.
The supply voltage is at rated value. So current through the shunt field winding is also its rated value. Hence the speed is also the rated value.
Resistance is increased, shunt field current is reduced (flux is reduced) and speed
is increased beyond its rated value.
ii. Armature voltage control or rheostatic control
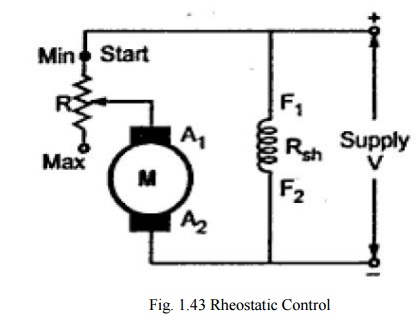
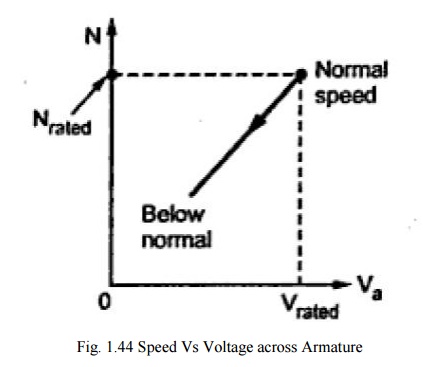
The speed is directly proportional to the voltage applied across the armature.
As the supply voltage is normally constant, the voltage across the armature can be controlled by adding a variable resistance in series with the armature as shown in figure above.
iii. Applied voltage control
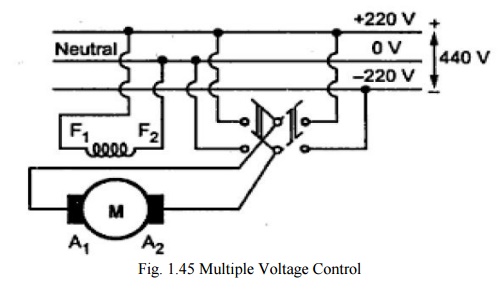
Shunt field of the motor is permanently connected to the fixed voltage supply.
Armature is supplied with various voltages by means of suitable switchgear arrangements.
iv. Potential divider control
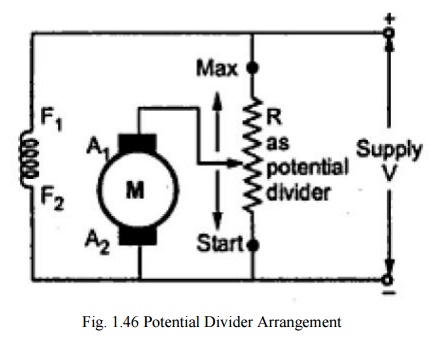
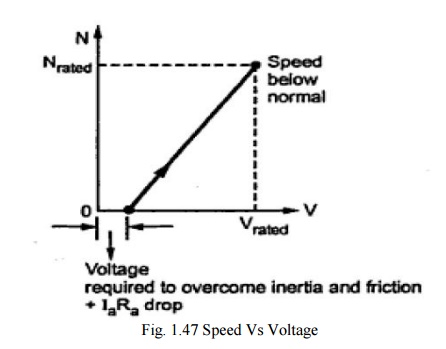
When the variable rheostat position is at start point shown, voltage across the armature is zero.
As rheostat is moved towards minimum point shown, the voltage across the armature increases, increasing the speed.
At maximum point the voltage is maximum and speed is rated value
Related Topics