Chapter: Civil : Principles of Solid Mechanics : Introduction
Principal or Eigen value Representation
Principal or
Eigen value Representation
Under a general linear transformation,
all points in a body are displaced such that while straight lines remain
straight, most rotate while they also change in length. However, as we have
seen, certain directions (lines) 'transform upon themselves' (or parallel to
themselves if not from the origin) without rotation and the general tensor must
reduce to the special, simple scalar form:
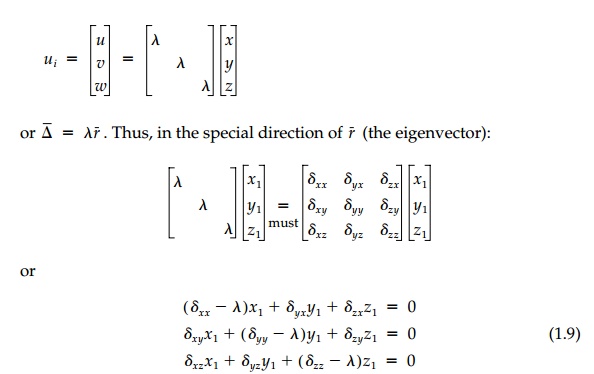
For a nontrivial solution to Equation
(1.9), the determinant of the coeffi-cients must equal zero. Expanding this
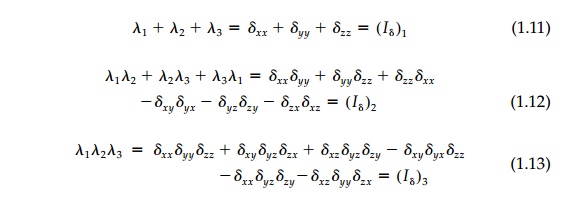
determinant gives 'the characteristic equation'*

The three roots (real
or imaginary-some of which may be equal) are called 'eigenvalues' each with its
own eigenvector or characteristic direction. Once the roots are determined,
they each can be substituted back into Equation (1.9) to find the corresponding
direction ri = xii +
yij + zik.
There are a number of remarkable aspects
to this characteristic equation. Perhaps the most important is the invariant
nature of the coefficients. The three roots (?1, ?2, ?3)
diagonalize the general transformation for one special orientation of axes.
However, the choice of initial coordinate system is com-pletely arbitrary. Thus
the coefficients must be invariant. That is:
The overriding
importance of these invariant directions will become appar-ent when we discuss
the strain and stress tensors.
For
the general displacement transformation tensor, ?ij, with a rotation
![]()
![]() component, the
invariant directions given by the eigenvectors r1 Bar,
r2 Bar, r3 Barfor each
root ?1, ?2, ?3 need not be orthogonal.
However, for the symmetric, dij, component (nonrotational),
the roots are real and the three invariant directions are orthogonal.
They are called principal (principal values and prin-cipal directions
perpendicular to principal planes). The search for this principal
representation, which diagonalizes a symmetric tensor to the prin-cipal values
and reduces the invariants to their simplest forms, is crucial to a physical
understanding of stress, strain, or any other second-order tensor.
component, the
invariant directions given by the eigenvectors r1 Bar,
r2 Bar, r3 Barfor each
root ?1, ?2, ?3 need not be orthogonal.
However, for the symmetric, dij, component (nonrotational),
the roots are real and the three invariant directions are orthogonal.
They are called principal (principal values and prin-cipal directions
perpendicular to principal planes). The search for this principal
representation, which diagonalizes a symmetric tensor to the prin-cipal values
and reduces the invariants to their simplest forms, is crucial to a physical
understanding of stress, strain, or any other second-order tensor.
To summarize this brief
introduction of linear transformations, we have seen that:
a. Under
linear transformation, geometric shapes retain their basic identity: straight
lines remain straight, parallel lines remain paral-lel, ellipses stay elliptic,
and so forth.
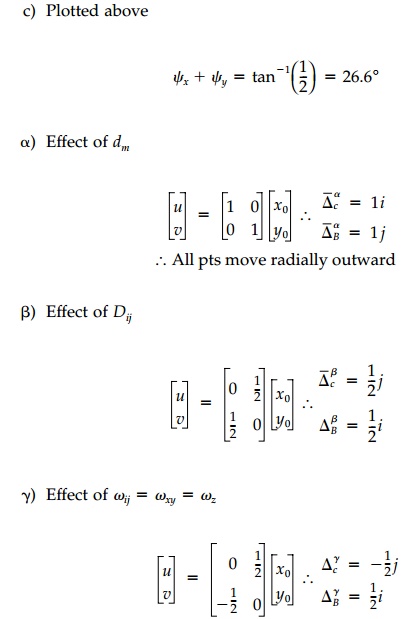
b. However,
such linear transformations may involve:
(i) Volume
change (isotropic effect), dm,
(ii) Distortion
due to compensating angle change (shear or devi-atoric effect), Dij,
and
(iii) Rotation,
?ij.
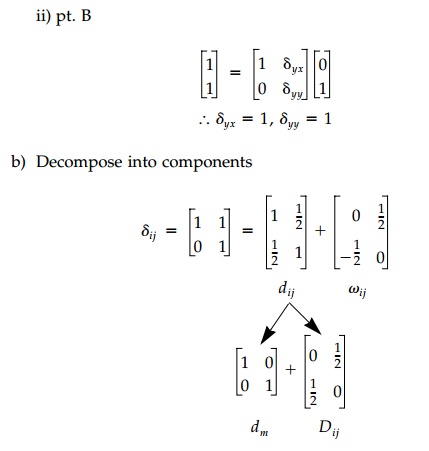
c. These
three effects can be seen separately if the general tensor ij
is decomposed into component parts: ?ij =
dm = Dij + ?ij
as illus-trated in Example 1.1.
d. The
invariant 'tensor' quality of a linear transformation is expressed in the
coefficients of the characteristic equation, which remain constant for any
coordinate system even while the nine individual elements change. Since nature
knows no man-made coordinate system, we should expect the fundamental 'laws' or
phenomena of mechanics (which deals with tensors of various orders) to involve
these invariant and not the individual coordinate-dependent elements.
e. The
roots of this characteristic equation with their orientation in space (i.e.,
eigenvalues and eigenvectors, which reduce the tensor to its diagonal form) are
called 'principal.' If the tensor is sym-metric (i.e., no rotation), the
principal directions are orthogonal.
Example 1.1
Using the general definition [Equation
(1.4)], determine the linear displace-ment tensor that represents the
transformation of the triangular shape ABC into AB'C'
as shown below and sketch the components.

Related Topics