Chapter: Power System Operation and Control : Introduction
Overview of Power System Control (Plant Level and System Level Control)
OVERVIEW OF POWER SYSTEM CONTROL (PLANT LEVEL AND SYSTEM LEVEL CONTROL)
Ø The function of an electric power system is to convert energy from one of the naturally available forms to electrical from and to transport it to points of consumption.
Ø A properly designed and operated power system should meet the following fundamental requirement.
1. Adequate „spinning reserve’ must be present to meet the active and reactive power demand.
2. Minimum cost with minimum ecological impact.
3. The power quality must have certain minimum standards within the tolerance or limit such as,
Ø Constancy of frequency.
Ø Constancy of voltage (Voltage magnitude and load angle).
Ø Level of reliability.
Factor affecting power quality:
Ø Switching surges.
Ø Lightning.
Ø Flickering of voltage.
Ø Load shedding.
Ø Electromagnetic interference.
Ø Line capacitance and line inductance.
Ø Operation of heavy equipment.
The three main controls involved in powers are:
1. Plant Level Control (or) Generating Unit Control.
2. System Generation Control.
3. Transmission Control.
1. Plant Level Control (or) Generating Unit Control
The plant level control consists of:
I. Governor control or Prime mover control.
II.Automatic Voltage Regulator (AVR) or Excitation control.
I. Governor control or Prime mover control
Ø Governor control or Prime mover controls are concerned with speed regulation of the governor and the control of energy supply system variables such as boiler pressure, temperature and flows.
Ø Speed regulation is concerned with steam input to turbine.
Ø With variation in load, speed of governor varies as the load is inversely proportional to speed.
Ø The speed of the generator varies and the governor senses the speed and gives a command signal, so that, the steam input of the turbine is changed relative to the load requirement.
II. Automatic Voltage Regulator (AVR) or Excitation control
Ø The function of Automatic Voltage Regulator (AVR) or Excitation control is to regulate generator voltage and relative power output.
Ø As the terminal voltage varies the excitation control, it maintains the terminal voltage to the required standard and the demand of the reactive power is also met by the excitation control unit.
These controls are depicted in given figure 1.4
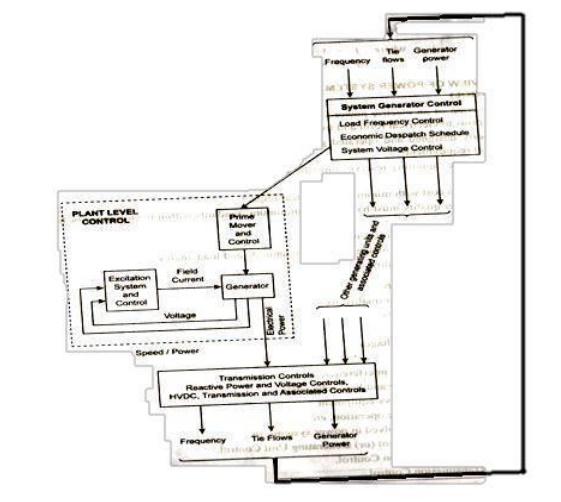
2. System Generation Control
Ø The purpose of system generation control is to balance the total system generation against system load and losses, so that, the desired frequency and power interchange with neighboring systems are maintained.
Ø This comprises of:
I. Load Frequency Control (LFC).
II.Economic Dispatch Control (EDC).
III.System Voltage Control.
IV. Security control.
i. Load Frequency Control (LFC).
Ø This involves the sensing of the bus bar frequency and compares with the tie line power frequency.
Ø The difference of the signal is fed to the integrator and it is given to speed changer which generates the reference speed for the governor.
Ø Thus, the frequency of the tie line is maintained as constant.
ii. Economic Dispatch Control (EDC).
Ø When the economical load distribution between a number of generator units is considered, it is found that the optimum generating schedule is affected when an incremental increased at one of the units replaces a compensating decrease at every other unit, in term of some incremental cost.
Ø Optimum operation of generators at each generating station at various station load levels is known as unit commitment.
iii. System Voltage Control.
Ø This involves the process of controlling the system voltage within tolerable limits.
Ø This includes the devices such as static VAR compensators, synchronous condenser, tap changing transformer, switches, capacitor and reactor.
Ø The controls described above contribute to the satisfactory operation of the power system by maintaining system voltages, frequency and other system variables within their acceptable limits.
Ø They also have a profound effect on the dynamic performance of power system and on its ability to cope with disturbances.
iv. Security control
Ø The main objective of real time power system operation requires a process guided by control and decisions based on constant monitoring of the system condition.
Ø The power system operation is split into two levels.
LEVEL 1: Monitoring and Decision
Ø The condition of the system is continuously observed I the control centres by protective relays for faults or contingencies caused by equipment trouble and failure.
Ø If any of these monitoring devices identifies a sufficiently severe problem at the sample time, then the system is in an abnormal condition.
Ø If no such abnormality is observed, then the system is in a normal condition.
LEVEL 2: Control
Ø At each sample, the proper commands are generated for correcting the abnormality on protecting the system from its consequences.
Ø If on abnormality is observed, then the normal operation proceeds for the next sample interval.
Related Topics