Chapter: Signals and Systems : Linear Time Invariant Discrete Time Systems
Linear Time Invariant Discrete Time Systems
LINEAR TIME INVARIANT DISCRETE
TIME SYSTEMS
1. Introduction
A
discrete-time system is anything that takes a discrete-time signal as input and
generates a discrete-time signal as output.1 The concept of a system is very
general. It may be used to model the response of an audio equalizer . In
electrical engineering, continuous-time signals are usually processed by
electrical circuits described by differential equations.
For
example, any circuit of resistors, capacitors and inductors can be analyzed
using mesh analysis to yield a system of differential equations. The voltages
and currents in the circuit may then be computed by solving the equations. The
processing of discrete-time signals is performed by discrete-time systems.
Similar to the continuous-time case, we may represent a discrete-time system
either by a set of difference equations or by a block diagram of its
implementation.
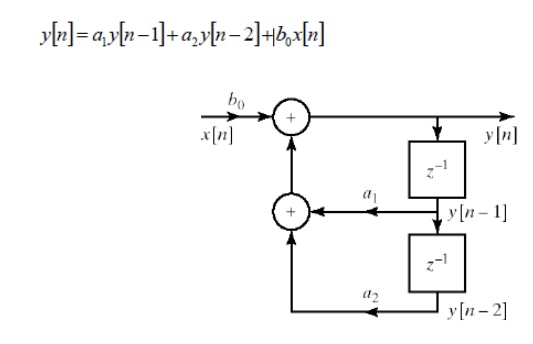
For
example, consider the following difference equation. y(n) =
y(n-1)+x(n)+x(n-1)+x(n-2) This equation represents a discrete-time system. It
operates on the input signal x(n)x(n) to produce the output signal y(n).
2. BLOCK DIAGRAM REPRESENTATION
Block
diagram representation of
LTI
systems with rational system function can be represented as
constant-coefficient difference equation
• The
implementation of difference equations requires delayed values of the
– input
– output
–
intermediate results
• The
requirement of delayed elements implies need for storage
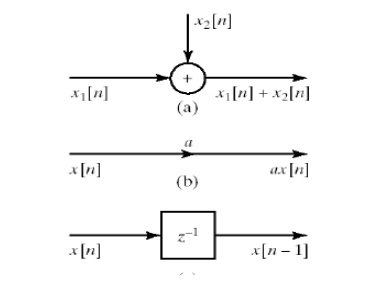
We also
need means of
–
addition
–
multiplication
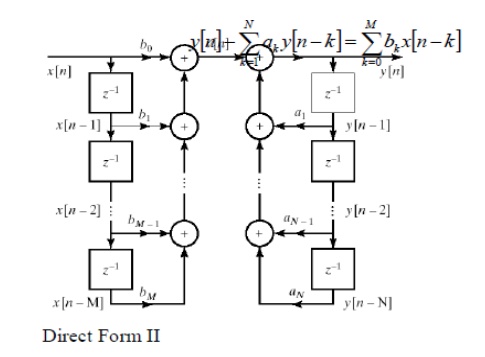
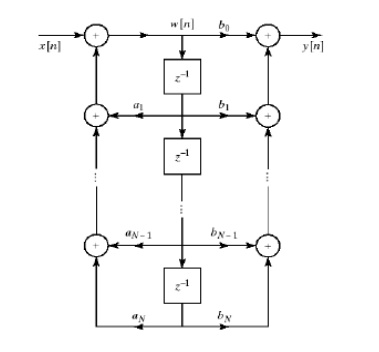
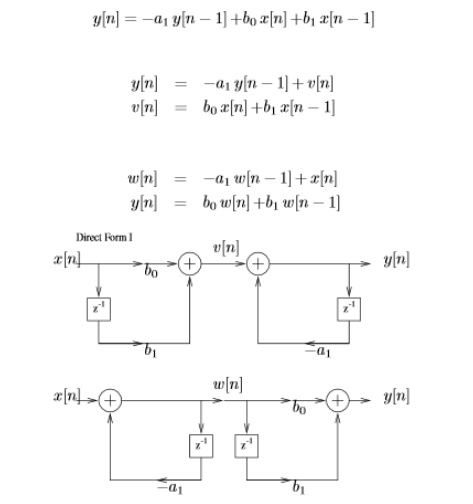
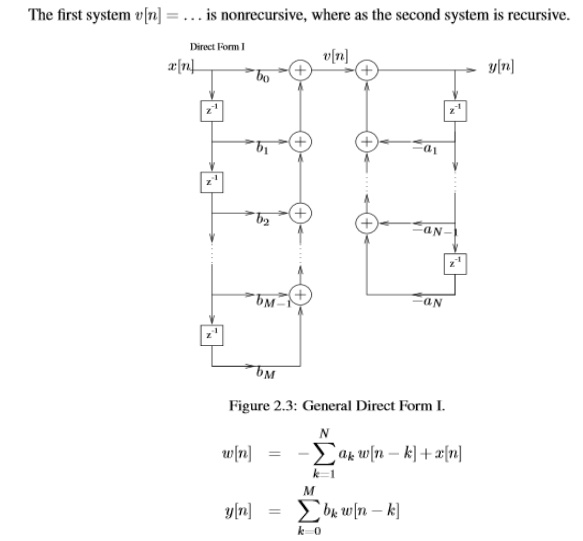
Direct Form I
General
form of difference equation
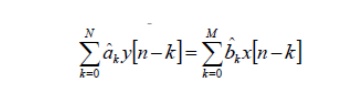
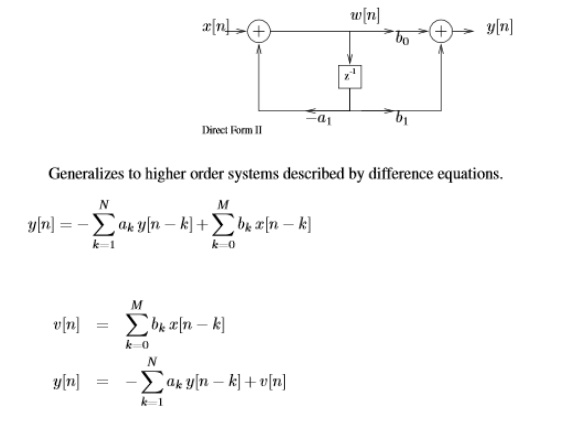
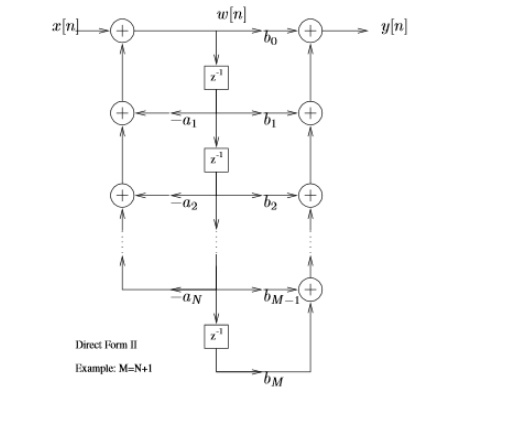
Alternative
equivalent form
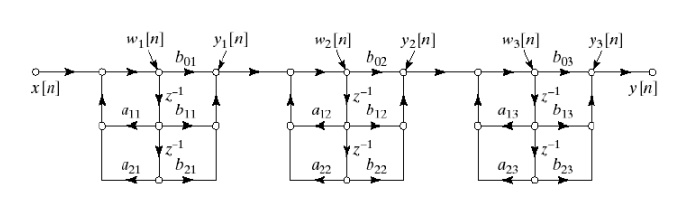
• Cascade
form
General
form for cascade implementation
Parallel
form
Represent system function using partial
fraction expansion
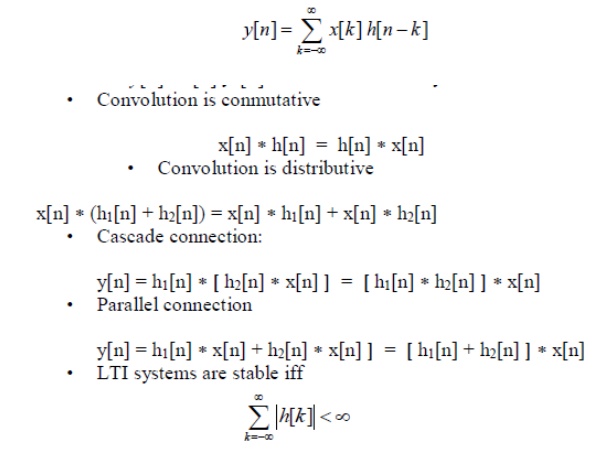
3. CONVOLUTIO N SUM
The
convolution sum provides a concise, mathematical way to express the output of an
LTI system based on an arbitrary discrete-time input signal and the system's
response. The convolution sum is expressed as
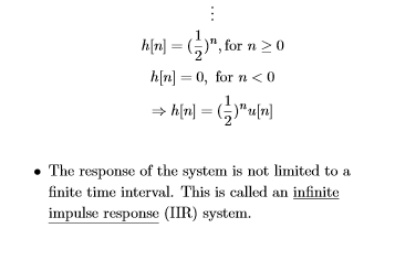
LTI
systems are causal if
h[n]
= 0 n < 0
4. LTI System
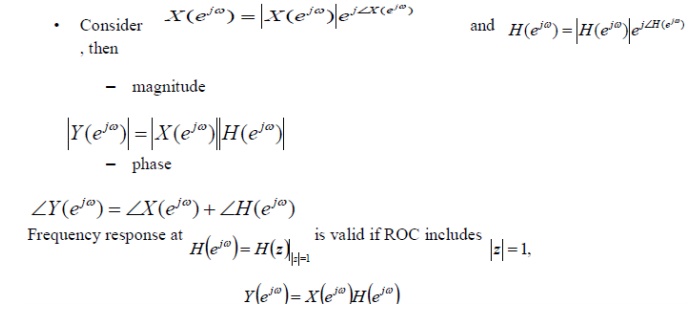
analysis using DTFT
LTI SYSTEMS ANALYSIS USING DTFT
5. LTI SYSTEM
ANALYSIS USING Z-TRANSFORM
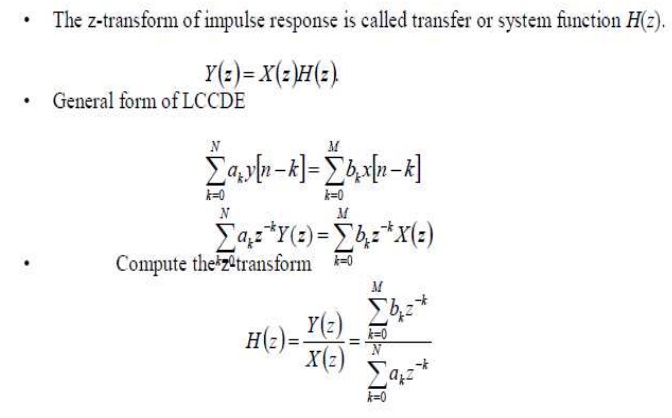
The
z-transform of impulse response is called transfer or system function H(z).
Y(z)=X(z)H(z)
General
form of LCCDE
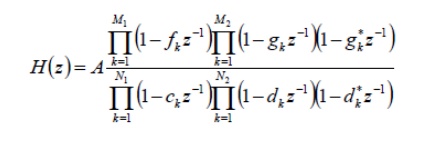
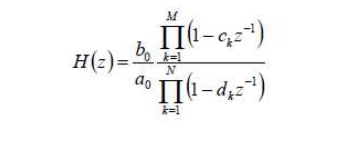
System
unction: Pole/zero Factorization
Stability
requirement can be verified
Choice
of ROC determines causality.
Location
of zero and poles determines the frequency response and phase
Sample Problems:
1. Consider the system described by
the difference equation.
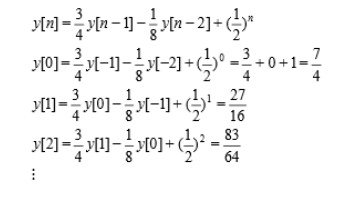
2. Given y[-1]=1 and y[-2]=0.
Compute recursively a few terms of the following 2nd order DE:
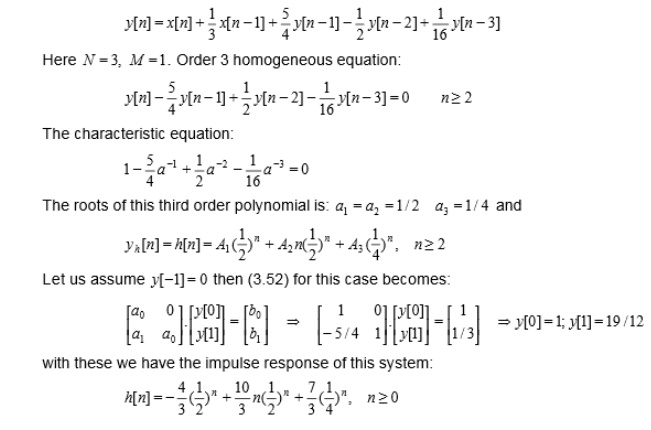
3. Compute the impulse response of
the system described by,

4. Obtain the structures
realization of LTI system
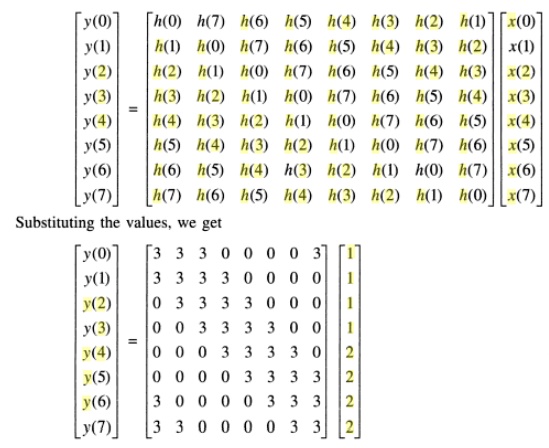
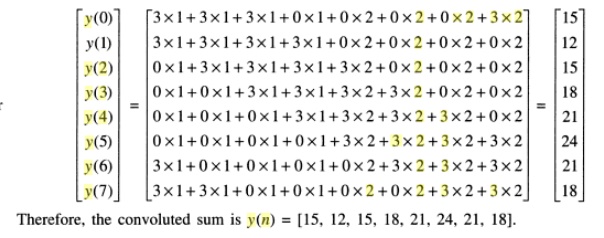
5. Find the convolution of
x(n)=[1,1,1,1,2,2,2,2] with h(n)=[3,3,0,0,0,0,3,3] by using matrix method.
Solution: By using matrix method,
N=8
Related Topics