Chapter: Mechanical : Kinematics of Machinery : Kinematics Of Linkage Mechanisms
Important Short Questions and Answers: Kinematics Of Linkage Mechanisms
1. What are the components of acceleration?
Radial
component of acceleration
Tangential
component of acceleration
2. Write an expression for find number of
instantaneous centers in a mechanism.
N=n(n-1)/2, n-no
of links
3. What
is expression for Coriolis componenet of acceleration?
a BC
=2rw
Where w=Angular
velocity of
‘OA’
V=Linear velocity of ‘B’
4.
How can
we represent the direction of linear velocity of any point on a link with
respect to another point on the same link?
The
direction of linear velocity of any point on a link with respect to another
point on the
same link
the direction is perpendicular to the line joining the points.
5.
What is
the expression for radial and tangential component of acceleration?
Radial
component
Arc
OB=wOB*OB Tangential component
Arc OB=aOB*OB
Where wOB=Angular
velocity of link OB aOB=Angular
acceleration of link OB OB=Length of link OB.
(Radial
component of acceleration is perpendicular to the velocity of the component and
tangential
component is perpendicular to link position)
6. Define instantaneous center and instantaneous
axis?
Instantaneous center of a moving body may be
defined as that center which goes on changing from one instant to another.
Instantaneous axis is a line drawn through an
instantaneous center and perpendicular to the plane of motion.
7.
What are
the names of instantaneous center?
Virtual
center Centro Rotopole.
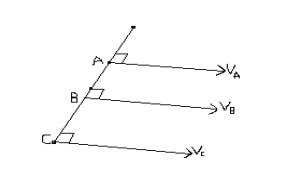
8.
How can
we apply instantaneous center method to determine velocity?
Consider
three points A, B, C on a rigid link. I am being instantaneous Center. Let VA,
VB, VC be the points A, B & C. Then we have
VA/IA=VB/IB=VC/IC
9. What is
the objective of Kinematic analysis?
The
objective of Kinematic analysis is to determine the Kinematic quantities such
as displacement, velocity and acceleration of the element in a mechanism.
10. Write any two rules to locate Instantaneous
center.
When two
links are connected by a pin joint the instantaneous center lies on the center
of
the pin.
When two links have a sliding contact, the
instantaneous center lies at infinity in a direction perpendicular to the path
of motion of slide.
11. Define Kennedy’s theorem.
The
Kennedy’s theorem states that if three bodies move relatively to each other,
they
have
three instantaneous centers and lie on a straight line.
12. What is meant by efficiency of a mechanism?
Efficiency
of a mechanism is defined as the ratio of the product of force and velocity in
driven link
to the product of force and velocity in driving link.
13. A pin joins two links A & B. A rotates with
wA angular
velocity and B rotates with
wB angular velocity in opposite
direction. What is the rubbing velocity of that point?
Rubbing
velocity of pin = ( wA + wB ) * r Where ‘r’ is the radius of pin.
14. What is the magnitude of linear velocity of a
point B on a link AB relative to A?
The
magnitude of linear velocity of a point B on a link AB, which rotates with
‘w’ angular velocity with respect to A is: VB/A =w A/B *AB
Related Topics