Chapter: Mechanical : Kinematics of Machinery : Kinematics Of Linkage Mechanisms
Kinematics of Linkage Mechanisms
KINEMATICS OF LINKAGE MECHANISMS
Displacement, velocity and acceleration analysis in
simple mechanisms: Important Concepts in Velocity Analysis
1. The
absolute velocity of any point on a mechanism is the velocity of that point
with reference to ground.
2. Relative
velocity describes how one point on a mechanism moves relative to another point
on the mechanism.
3. The
velocity of a point on a moving link relative to the pivot of the link is given
by the equation: V = r, where = angular velocity of the link and r =
distance from pivot.
Acceleration Components
·
Normal Acceleration:An = 2r. Points toward the
center of rotation
·
Tangential Acceleration:At = r. In a direction perpendicular to the link
·
Coriolis Acceleration:Ac = 2
(dr/dt). In a direction perpendicular to the link
·
Sliding Acceleration:As = d2r/dt2.
In the direction of sliding.
A
rotating link will produce normal and tangential acceleration components at any
point a distance, r, from the rotational pivot of the link. The total acceleration
of that point is the vector sum of the components.
A slider
attached to ground experiences only sliding acceleration.
A slider
attached to a rotating link (such that the slider is moving in or out along the
link as the link rotates) experiences all 4 components of acceleration. Perhaps
the most confusing of these is the coriolis acceleration, though the concept of
coriolis acceleration is fairly simple. Imagine yourself standing at the center
of a merry-go-round as it spins at a constant speed ( ). You begin to walk
toward the outer edge of the merry-go-round at a constant speed (dr/dt). Even
though you are walking at a constant speed and the merry-go-round is spinning
at a constant speed, your total velocity is increasing because you are moving
away from the center of rotation (i.e. the edge of the merry-go-round is moving
faster than the center). This is the coriolis acceleration. In what direction
did your speed increase? This is the direction of the coriolis acceleration.
The total
acceleration of a point is the vector sum of all applicable acceleration
components:
A = An + At +
Ac + As
These
vectors and the above equation can be broken into x and y components by
applying sines and cosines to the vector diagrams to determine the x and y
components of each vector. In this way, the x and y components of the total
acceleration can be found.
Graphical Method, Velocity and Acceleration
polygons : * Graphical velocity analysis:
It is a
very short step (using basic trigonometry with sines and cosines) to convert
the graphical results into numerical results. The basic steps are these:
1. Set up a
velocity reference plane with a point of zero velocity designated.
2. Use the
equation, V = r, to calculate any known
linkage velocities.
3. Plot your
known linkage velocities on the velocity plot. A linkage that is rotating about
ground gives an absolute velocity. This is a vector that originates at the zero
velocity point and runs perpendicular to the link to show the direction of
motion. The vector, VA, gives the
velocity of point A.
4. Plot all
other velocity vector directions. A point on a grounded link (such as point B)
will produce an absolute velocity vector passing through the zero velocity
point and perpendicular to the link. A point on a floating link (such as B
relative to point A) will produce a relative velocity vector. This vector will
be perpendicular to the link AB and pass through the reference point (A) on the
velocity diagram.
5. One
should be able to form a closed triangle (for a 4-bar) that shows the vector
equation: VB = VA + VB/A where VB
= absolute velocity of point B, VA = absolute velocity of point A, and VB/A is the velocity of point B relative to point A.
Velocity and Acceleration analysis of mechanisms
(Graphical Methods):
Velocity
and acceleration analysis by vector polygons: Relative velocity and
accelerations of particles in a common link, relative velocity and
accelerations of coincident particles on separate link, Coriolis component of
acceleration.
Velocity
and acceleration analysis by complex numbers: Analysis of single slider crank
mechanism and four bar mechanism by loop closure equations and complex numbers.
ü Velocity
Analysis of Four Bar Mechanisms:
·
Problems solving in Four Bar Mechanisms and additional links.
ü Velocity
Analysis of Slider Crank Mechanisms:
·
Problems solving in Slider Crank Mechanisms and additional links.
ü Acceleration
Analysis of Four Bar Mechanisms:
·
Problems solving in Four Bar Mechanisms and additional links.
ü Acceleration
Analysis of Slider Crank Mechanisms:
· Problems solving in Slider Crank Mechanisms
and additional links.
ü Kinematic
analysis by Complex Algebra methods:
· Analysis of single slider crank mechanism and
four bar mechanism by loop closure equations and complex numbers.
ü Vector
Approach:
· Relative velocity and accelerations of
particles in a common link, relative velocity and accelerations of coincident
particles on separate link
ü Computer
applications in the kinematic analysis of simple mechanisms:
·
Computer programming for simple mechanisms
Coincident points, Coriolis Acceleration:
·
Coriolis Acceleration:Ac = 2
(dr/dt). In a direction perpendicular to the link. A slider attached to
ground experiences only sliding acceleration.
A slider
attached to a rotating link (such that the slider is moving in or out along the
link as the link rotates) experiences all 4 components of acceleration. Perhaps
the most confusing of these is the coriolis acceleration, though the concept of
coriolis acceleration is fairly simple. Imagine yourself standing at the center
of a merry-go-round as it spins at a constant speed ( ). You begin to walk
toward the outer edge of the merry-go-round at a constant speed (dr/dt). Even
though you are walking at a constant speed and the merry-go-round is spinning
at a constant speed, your total velocity is increasing because you are moving
away from the center of rotation (i.e. the edge of the merry-go-round is moving
faster than the center). This is the coriolis acceleration. In what direction
did your speed increase? This is the direction of the coriolis acceleration.
Linkage Synthesis
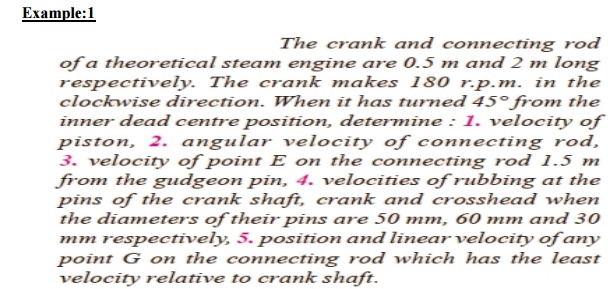
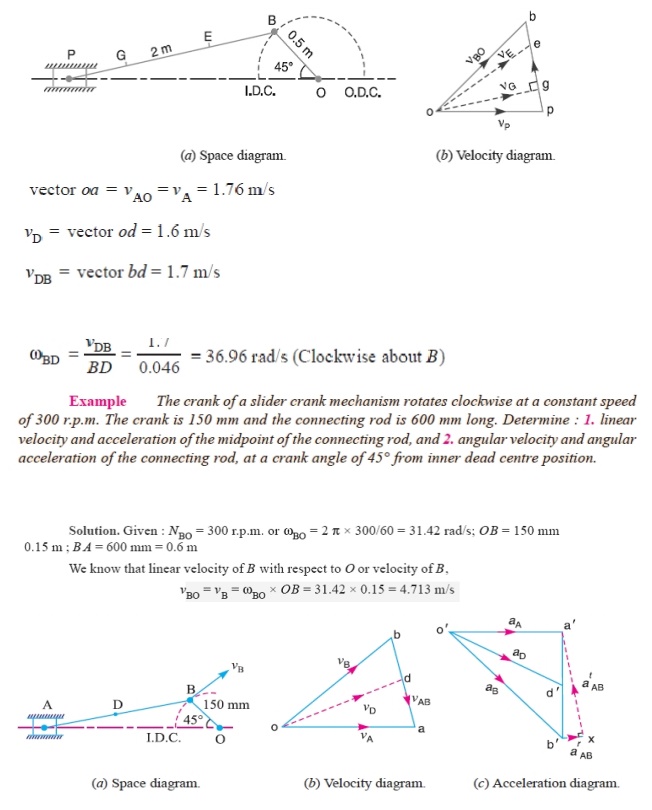
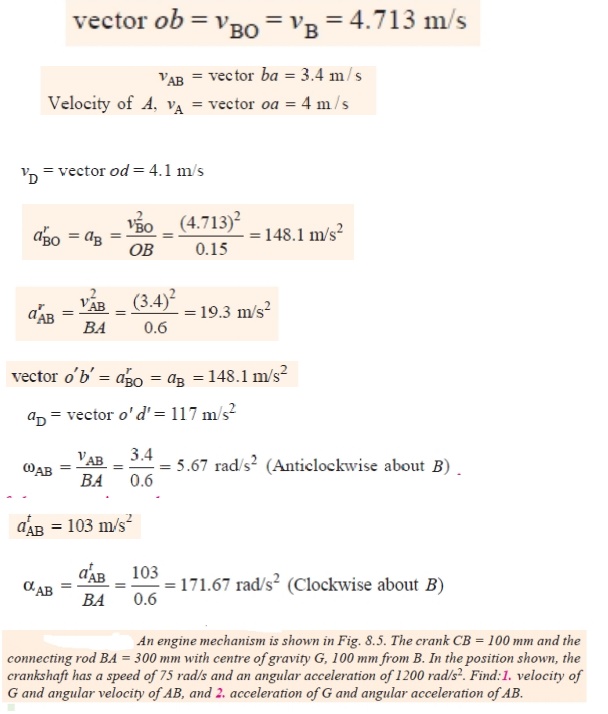
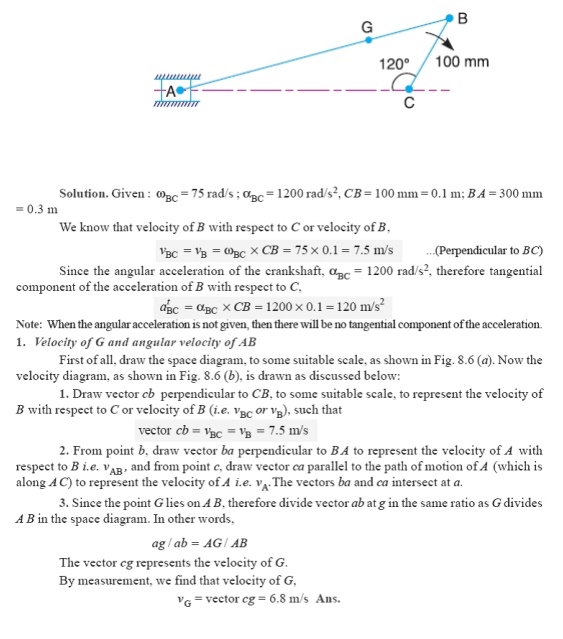
Problem Example:1
Related Topics