Chapter: Network Programming and Management : Application Development
Handling the Interrupted System Calls
Handling the Interrupted System Calls:
The basic rule that applies here is that when a
process is blocked in a slow system call and the process catches a signal and
the signal handler returns, the system call can return an error of EINTR.
(Error interruption). For portability, when the programmes are written, one
must be prepared for slow system calls
to return EINTR. Even if some system supports the SA_RESTART flag, not all
interrupted system calls
may automatically be started. Most
Berkeley-derived implementation never automatically restart.
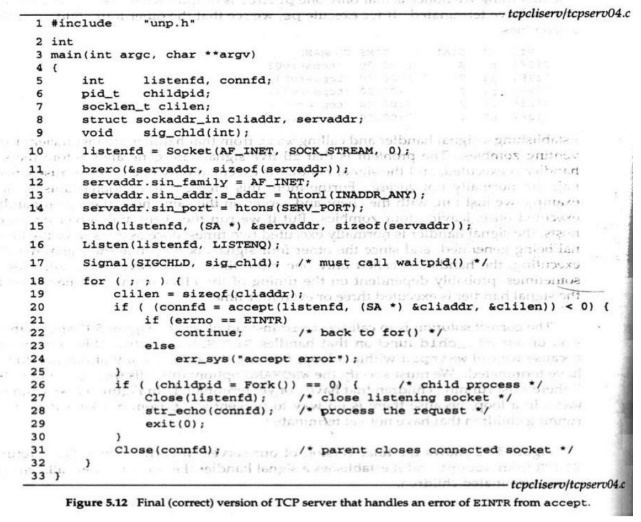
To handle interrupted accept,
we change the call
to accept (in the server programme) in the
following way:
for ( ; ; ) {
clilen = sizeof(cliaddr);
if ( ( connfd = accept (listenfd, (SA) &
cliaddr, & clilen)) < 0) {
if (errno == EINTR
continue;
else
err_sys (― accept error‖);
}
}
IN this
code, the interrupted system call is restarted. This
method works for the functions read,
write, select and open etc. But there is one
function that cannot be restarted by itself. – connect. If this function returns
EINTR, we cannot call it again, as doing so will return an immediate error. In
this case we must call select to wait for the connection to complete.
Wait () and waitpid () functions: pid_t
wait(int *statloc);
pid_t
waitpid (pid_t pid, int *statloc, int
options);
wait and waitpid both return two values: the
return value of the function is the process ID of the terminated child, and the
termination status of the child (integer) is returned through statloc pointer.
(Termination status are determined when three macros are called that examine
the termination status and tell if the child terminated normally, was killed by
a signal or is just the job control stopped. Additional macros tell more
information on the reason.)
If there are no terminated children for the
calling wait, but the process has one or more children that are still
executing, then wait blocks until the first of the existing children terminate.
waitpid gives us more control over which process to wait for and whether or not to block. pid argument specify the process id that we want to wait for. a value of -1 says to wait for the first of our children to terminate. The option argument lets us specify additional options. The most common option is WNOHANG This tells the kernel not to block if there are no terminated children; it blocks only if there are children still executing.
The wait pid argument specifies a set of child processes for which status is requested. The waitpid() function shall only return the status of a child process from this set.
•
If pid
is equal to (pid_t) -1, status is requested for any child process. IN this
respect, waitpid() is similar to wait().
• If pid is greater than 0, it specifies the process ID of a single child process for which status is requested.
• If pid is 0, status is requested for any child process whose process groups.
Difference
between wait and waitpid:
To understand the difference, TCP / IP client
programme is modified as follows:
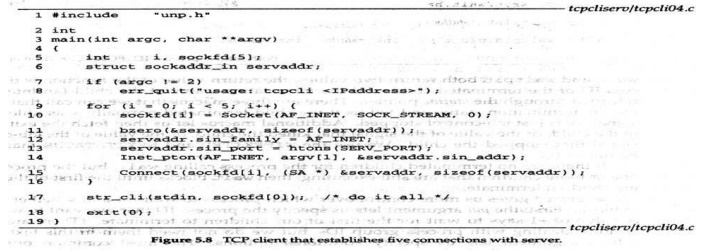
The
client establishes five connections with the server and then uses only the
first one (sockfd[0] ) in the call
to str_cli. The purpose of
establishing multiple connections is to spawn multiple children from the
concurrent server .
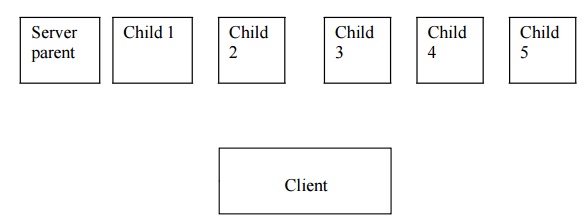
When the client terminates, all open
descriptors are closed automatically by the kernel and all the five serve
children terminate at about the same time. This causes five SIGCHLD signals to
be delivered to the parent at about the same time, which we show in Figure
below:
It is
this delivery of multiple occurrences of the same signal that causes the
problem that we are talking about. By executing ps, one can see that other
children still exist as zombies.
Establishing a signal handler and calling wait
form the signal handler are insufficient for preventing zombies. The problem is
that all five signals are generated before the signal handler is executed, and
the signal handler is executed only one time because Unix signals are not
normally queued. Also this problem is non deterministic.
(If the
client and server are on the same host, one child is terminated leaving four
zombies. If we run the client and server on different hosts, the handler is
executed twice once as a result of the first signal being generated and since
the other four signals occur while the signal handling is executing, the
handler is called once more This leaves three zombies. However depending on the
timing of the FIN arriving at the server host, the signal handler is executed
three or even four times).
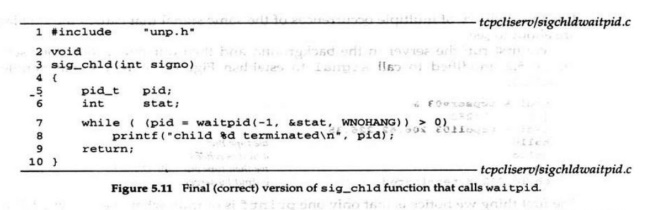
The
correct solution is to call waitpid instead of wait. Following code shows the
server version of our sig_ chld function that handles SIGCHLD. Correctly. This
version works because we call waitpid within the loop, fetching the status of
any of our children that have terminated. We must specify the WNOHNG option;
This tells waitpid not to block if there exists running children that not yet
terminated. . In the code for wait , we cannot call wait in a loop, because
there is no to prevent wait from blocking if there exits running children that
have not yet terminated. Following version correctly handles a return EINTR
from accept and it establishes a signal handler that called waitpid for all terminated children.
The following programme shows the implementation
of waitpid(). The second part is the implementation of complete server
programme incorporating the signal handler.
The three scenarios that we encounter with
networking programme are :
We must
catch SIGCHLD signal when forking child processes. We must handle interrupted
system calls when we catch signal.
A SIGCHLD handler must be coded correctly using
waitpid to prevent any zombies form being left around
Related Topics