Chapter: Aquaculture Engineering : Feeding Systems
Feed control systems - Feeding Systems in Aquaculture
Feed control
The appetite of the fish is affected by external factors, such as variation in water temperature, water quality, waves (in cages) and light conditions. With a normal feed control, the amount of feed to distribute during a given period is fixed. If there is variation in fish appetite there are no possibilities for controlling this. This requires one of two solutions: the use of restrictive feeding with no feed loss, (really underfeeding), or acceptance of a certain feed loss which is expensive and damaging to the environment.
Hand feeding is an old-fashioned system for regulating feed supply. The person who is feeding observes the appetite of the fish visually, and in this way regulates the amount of feed supplied according to fish appetite. One way to improve the feed control and utilization of feed is to use a feeder for basic feeding and hand feeding for topping up; this, however, requires manpower. Based on this, systems have been developed for automatic feed control which are of special interest in production units where large amounts of feed are used, such as large sea cages.
Feed control systems
Feed control systems can be divided into manual and automatic systems. In tanks, manual systems are used. The dual drain system with a particle trap represents such a system. If this system is correctly designed, it is easy to observe any feed loss in the screen or separation unit for the particle outlet. When screening the total outlet water from each tank, the feed loss may also be observed. This, however, requires a large screen on each tank, which is more expensive.
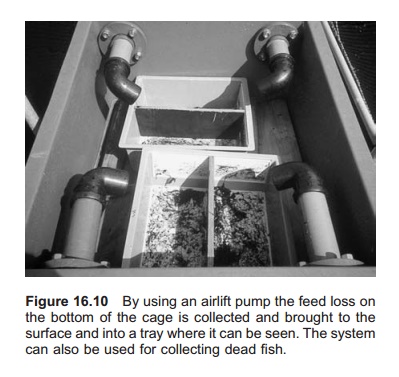
In sea cages a number of methods have been introduced. A manually operated method is to use a submersible video camera under the cage and watch randomly for feed loss when the feeder is running. Another manual method is to use a stocking (a small net bag in the shape of a tube) in the lower part and under the net bag. Here feed loss and dead fish are collected. An airlift pump brings the feed loss and dead fish to the surface and into a collecting bucket, where feed loss can be visually controlled and the daily feeding amount may be regulated (Fig. 16.10). Equipment to detect the gathering behaviour, such as infrared photoelectric sensors, has also been used to control feeding.
Hydro-acoustic sensors, photocells, linear video and Doppler signals are all used for automatically measuring feed loss. Either the sensor can be placed under the cage or inside it to measure the feed loss over a sample area. The sensor sends a signal to the feed controller to stop when feed loss exceeds a certain level. In tanks ultrasonic devices have been used to control the waste feed. A system observing the gathering behaviour in relation to feeding has also been used for automatic feed control.
Related Topics