Chapter: Software Architectures : Architectural Views
Architectural Blueprints - The ŌĆ£4+1ŌĆØ View Model of Software Architecture
Abstract
This article presents a model for describing the architecture of
software-intensive systems, based on the use of multiple, concurrent views.
This use of multiple views allows to address separately the concerns of the
various ŌĆśstakeholdersŌĆÖ of the architecture: end-user, developers, systems
engineers, project managers, etc., and to handle separately the functional and
non functional requirements. Each of the five views is described, together with
a notation to capture it. The views are designed using an
architecture-centered, scenario-driven, iterative development process.
Introduction
We all have seen many books and articles where one
diagram attempts to capture the gist of the architecture of a system. But
looking carefully at the set of boxes and arrows shown on these diagrams, it
becomes clear that their authors have struggled hard to represent more on one
blueprint than it can actually express. Are the boxes representing running
programs? Or chunks of source code? Or physical computers? Or merely logical
groupings of functionality? Are the arrows representing compilation
dependencies? Or control flows? Or data flows? Usually it is a bit of
everything. Does an architecture need a single architectural style? Sometimes the
architecture of the software suffers scars from a system design that went too
far into prematurely partitioning the software, or from an over-emphasis on one
aspect of software development: data engineering, or run-time efficiency, or
development strategy and team organization. Often also the architecture does
not address the concerns of all its ŌĆ£customersŌĆØ (or ŌĆ£stakeholdersŌĆØ as they are
called at
USC). This problem has been noted by several
authors: Garlan & Shaw, Abowd & Allen at CMU, Clements at the SEI. As a remedy, we propose
to organize the description of a software architecture using several concurrent
views, each one addressing one
specific set of concerns.
An Architectural Model
Software architecture deals with the design and implementation of the
high-level structure of the software. It is the result of assembling a certain
number of architectural elements in some well-chosen forms to satisfy the major
functionality and performance requirements of the system, as well as some
other, non-functional requirements such as reliability, scalability,
portability, and availability. Perry and Wolfe put it very nicely in this
formula2, modified by Boehm:
Software
architecture = {Elements, Forms, Rationale/Constraints}
Software architecture deals with abstraction, with
decomposition and composition, with style and esthetics. To describe a software
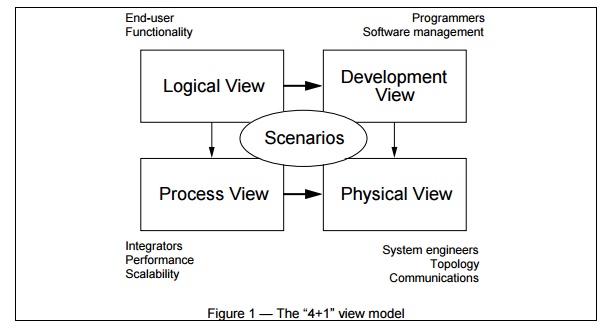
architecture, we use a model composed of multiple views or perspectives. In order to eventually address large and
challenging architectures, the model we propose is made up of five main views
(cf. fig. 1):
ŌĆó
The logical view, which is the
object model of the design (when an object-oriented design method is used),
ŌĆó
the process view, which captures the concurrency and synchronization
aspects of the design,
ŌĆó
the physical view, which describes the mapping(s) of the software onto
the hardware and reflects its distributed aspect, the development
view, which describes the static organization of the software in its
development environment.
We apply Perry & WolfŌĆÖs equation independently on each view, i.e.,
for each view we define the set of elements to use (components, containers, and
connectors) , we capture the forms and patterns that work, and we capture the
rationale and constraints, connecting the architecture to some of the
requirements.
Each view is described by a blueprint using its own particular notation. For each view also,
the architects can pick a certain architectural
style, hence allowing the coexistence of multiple styles in one system.
We will now look in turn at each of the five views,
giving for each its purpose: which concerns is addresses, a notation for the
corresponding architectural blueprint, the tools we have used to describe and
manage it. Small examples are drawn from the design of a PABX, derived from our
work at Alcatel Business System
and an Air Traffic Control system3, but in very simplified formŌĆöthe
intent here is just to give a flavor of the views and their notation and not to
define the architecture of those systems.
The ŌĆ£4+1ŌĆØ view model is rather ŌĆ£genericŌĆØ: other
notations and tools can be used, other design methods can be used, especially
for the and the logical and process decompositions, but we have indicated the
ones we have used with success
The Logical Architecture
The Object-Oriented Decomposition
The logical architecture primarily supports the functional requirementsŌĆöwhat
the system should provide in terms of services to its users. The system is
decomposed into a set of key abstractions, taken (mostly) from the problem
domain, in the form of objects or object classes. They exploit the
principles of abstraction, encapsulation, and inheritance. This decomposition
is not only for the sake of functional analysis, but also serves to identify
common mechanisms and design elements across the various parts of the system.
We use the Rational/Booch approach for representing the logical architecture,
by means of class diagrams and class
templates.4 A class diagram shows a set of classes and their logical relationships:
association, usage, composition,
inheritance, and so forth. Sets of related classes can be grouped into class
categories. Class templates focus on each individual class; they emphasize the
main class operations, and identify key object characteristics. If it is
important to define the internal behavior of an object, this is done with state
transition diagrams, or state charts. Common mechanisms or services are defined
in class utilities.
Alternatively to an OO approach, an application
that is very data-driven may use some other form of logical view, such as E-R
diagrams.
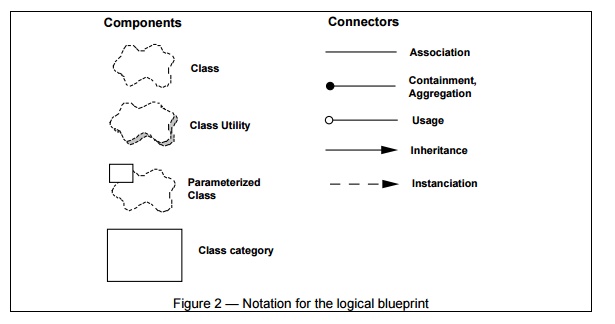
Notation for the logical view
The notation for the logical view is derived from the Booch notation It is considerably simplified to take into account only the items that are architecturally significant. In particular, the numerous adornments are not very useful at this level of design. We use Rational Rose® to support the logical architecture design.
Style for the logical view
The style we use for the logical view is an
object-oriented style. The main guideline for the design of the logical view is
to try to keep a single, coherent object model across the whole system, to
avoid premature specialization of classes and mechanisms per site or per
processor.
Examples of Logical blueprints
Figure
3a shows the main classes involved in the T├®lic PABX architecture.
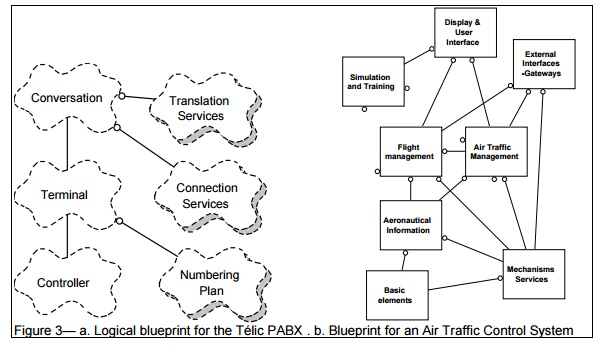
A PABX establishes commmunications between terminals. A terminal may be
a telephone set, a trunk line (i.e., line to central-office), a tie line (i.e.,
private PABX to PABX line), a feature phone line, a data line, an ISDN line,
etc. Different lines are supported by different line interface cards. The
responsibility of a line controller object
is to decode and inject all the signals on the line interface card, translating
card-specific signals to and from a
small, uniform set of events: start, stop, digit, etc. The controller also
bears all the hard real-time constraints. This class has many subclasses to
cater for different kinds of interfaces. The responsibility of the terminal object is to maintain the state
of a terminal, and negotiate services on behalf of that line. For example, it
uses the services of the numbering plan
to interpret the dialing in the selection phase. The conversation represents a set of terminals engaged in a
conversation. The conversation uses translation services (directory, logical
to physical address mapping, routes), and
connection services to establish
a voice path between the terminals.
For a much bigger system, which contains a few
dozen classes of architectural significance, figure 3b show the top level class
diagram of an air traffic control system, containing 8 class categories (i.e.,
groups of classes).
The Process Architecture
The Process Decomposition
The process architecture takes into account some
non-functional requirements, such as performance and availability. It addresses
issues of concurrency and distribution, of systemŌĆÖs integrity, of
fault-tolerance, and how the main abstractions from the logical view fit within
the process architectureŌĆöon which thread of control is an operation for an
object actually executed.
The process architecture can be described at
several levels of abstraction, each level addressing different concerns. At the
highest level, the process architecture can be viewed as a set of independently
executing logical networks of
communicating programs (called ŌĆ£processesŌĆØ), distributed across a set of
hardware resources connected by a LAN or a WAN. Multiple logical networks may
exist simultaneously, sharing the same physical resources. For example,
independent logical networks may be used to support separation of the on-line
operational system from the off-line system, as well as supporting the
coexistence of simulation or test versions of the software.
A process
is a grouping of tasks that form an executable unit. Processes represent the
level at which the process architecture can be tactically controlled (i.e.,
started, recovered, reconfigured, and shut down). In addition, processes can be replicated for increased distribution of the
processing load, or for improved availability.
The software is partitioned into a set of independent tasks. A task is a separate thread of
control, that can be scheduled individually on one processing node.
We can distinguish then: major tasks,
that are the architectural elements that can be uniquely addressed and minor tasks, that are additional tasks
introduced locally for implementation reasons (cyclical activities, buffering,
time-outs, etc.). They can be implemented as Ada tasks for example, or
light-weight threads. Major tasks communicate via a set of well-defined
inter-task communication mechanisms: synchronous and asynchronous message-based
communication services, remote procedure calls, event broadcast, etc. Minor
tasks may communicate by rendezvous or shared memory. Major tasks shall not
make assumptions about their collocation in the same process or processing
node.
Flow of messages, process loads can be estimated
based on the process blueprint. It is also possible to implement a ŌĆ£hollowŌĆØ
process architecture with dummy loads for the processes, and measure its
performance on the target system, as described by Filarey et al. in their
Eurocontrol experiment.
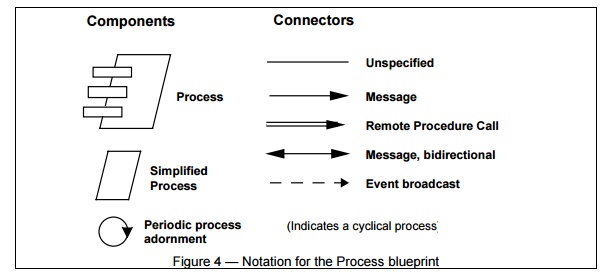
Notation for the Process view
The
notation we use for the process view is expanded from the notation originally
proposed by Booch for Ada tasking. Again the notation used focuses on the
elements that are architecturally significant. (Fig. 4)
We have used the Universal Network Architecture
Services (UNAS) product from TRW to architect and implement the set of
processes and tasks (and their redundancies) into networks of processes. UNAS
contains a toolŌĆöthe Software Architects Lifecycle Environment (SALE)ŌĆöwhich
supports such a notation. SALE allows for the graphical depiction of the
process architecture, including specifications of the possible inter-task
communication paths, from which the corresponding Ada or C++ source code is
automatically generated. The benefit of this approach to specifying and
implementing the process architecture is that changes can be incorporated
easily without much impact on the application software.
Style for the process view
Several styles would fit the process view. For
example, picking from Garlan and ShawŌĆÖs taxonomy we can have: pipes and filters,
or client/server, with variants of multiple client/single server and multiple
clients/multiple servers. For more complex systems, one could use a style
similar to the process groups approach of the ISIS system as described by K.
Birman with another notation and toolset.
Example of a Process blueprint
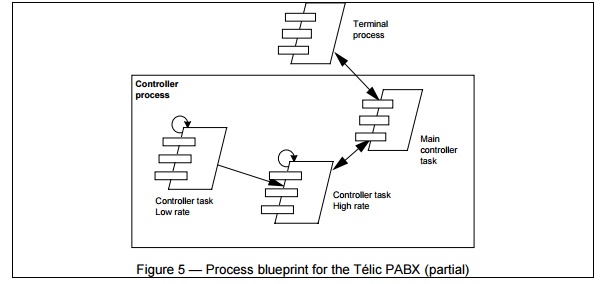
All terminals are handled by a single terminal process, which is driven by messages in its input queues.
The controller objects are executed on one of three tasks that composes the
controller process: a low cycle rate task scans all inactive terminals (200
ms), puts any terminal becoming active in the scan list of the high cycle rate task (10ms), which
detects any significant change of state, and passes them to the main controller task which interprets
the changes and communicates them by message to the corresponding terminal.
Here message passing within the
controller process is done via shared memory.
The Development Architecture
Subsystem decomposition
The development architecture focuses on the actual
software module organization on the software development environment. The
software is packaged in small chunksŌĆöprogram libraries, or subsystemsŌĆö that can be developed by one or a small number of
developers. The subsystems are organized in a hierarchy of layers, each layer providing a narrow and well-defined interface to
the layers above it.
The development architecture of the system is
represented by module and subsystem diagrams, showing the ŌĆśexportŌĆÖ and ŌĆśimportŌĆÖ
relationships. The complete development architecture can only be described when
all the elements of the software have been identified. It is, however, possible
to list the rules that govern the development architecture: partitioning,
grouping, visibility.
For the most part, the development architecture takes into account
internal requirements related to the ease of development, software management,
reuse or commonality, and to the constraints imposed by the toolset, or the
programming language. The development view serves as the basis for requirement
allocation, for allocation of work to teams (or even for team organization),
for cost evaluation and planning, for monitoring the progress of the project,
for reasoning about software reuse, portability and security. It is the basis
for establishing a line-of-product.
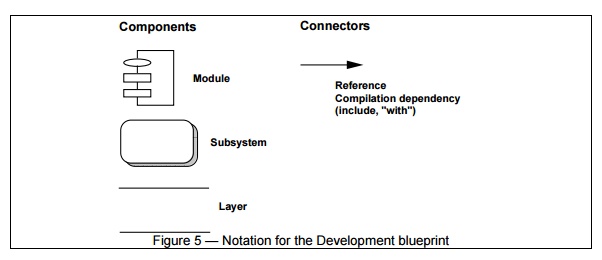
Notation for the Development
Blueprint
Again, a variation of the Booch notation, limiting it to the items that
are architecturally significant.
The Apex Development Environment from Rational
supports the definition and the implementation of the development architecture,
the layering strategy described above, and the enforcement of the design rules.
Rational Rose can draw the development blueprints at the module and subsystem
level, in forward engineering and by reverse engineering from the development
source code, for Ada and C++.
Style for the Development View
We recommend adopting a layered
style for the development view, defining some 4 to 6 layers of subsystems.
Each layer has a well-defined responsibility. The design rule is that a
subsystem in a certain can only depend on subsystem that are in the same layer
or in layers below, in order to minimize the development of very complex
networks of dependencies between modules and allow simple release strategies
layer by layer.
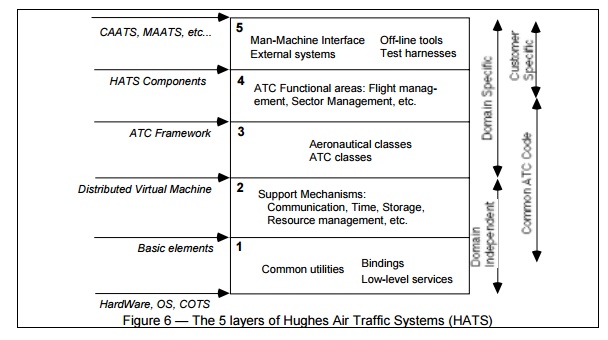
Example of Development
architecture
Figure 6 represents the development organization in five layers of a
line-of-product of Air Traffic Control
systems developed by Hughes Aircraft of Canada. This is the development
architecture corresponding to the logical architecture shown in fig. 3b.
Layers
1 and 2 constitute a domain-independent distributed infrastructure that is
common across the line of products and shields it from variations in hardware platform,
operating system, or off-the-shelf products such as database management system. To this
infrastructure, layer 3 adds an ATC framework to form a domain-specific software architecture. Using this framework a
palette of functionality is build in layer 4. Layer 5 is very customer- and product-dependent, and contains most
of the user-interface and interfaces with the external systems. Some 72
subsystems are spread across of the 5 layers, containing each from 10 to 50
modules, and can be represented on additional blueprints.
The Physical Architecture
Mapping the software to the
hardware
The physical architecture takes into account primarily the
non-functional requirements of the system such as availability, reliability
(fault-tolerance), performance (throughput), and scalability. The software
executes on a network of computers, or processing nodes (or just nodes for short). The various elements
identifiedŌĆö networks, processes, tasks, and objectsŌĆöneed to be mapped onto the
various nodes. We expect that several different physical configurations will be
used: some for development and testing, others for the deployment of the system
for various sites or for different customers. The mapping of the software to
the nodes therefore needs to be highly flexible and have a minimal impact on
the source code itself.
Notation for the Physical
Blueprint
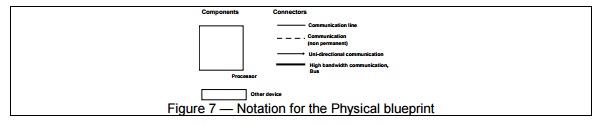
UNAS from TRW provide us here with data-driven means
of mapping the process architecture onto the physical architecture allowing a
large class of changes in the mapping without source code modifications.
Example of Physical
blueprint
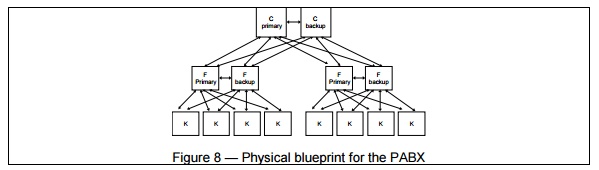
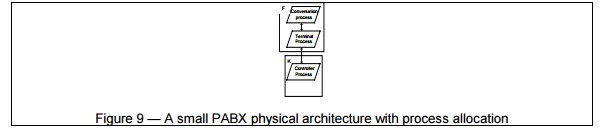
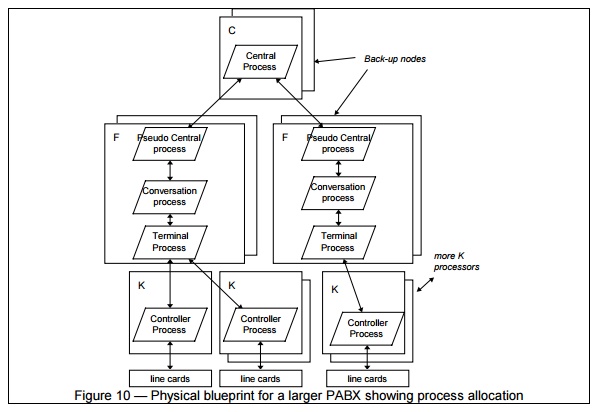
Figure 8 shows one possible hardware configuration for
a large PABX, whereas figures 9 and 10 show mappings of the process
architecture on two different physical architectures, corresponding to a small
and a large PABX. C, F and K are three types of computers of different
capacity, supporting three different executables.
Scenarios
Putting it all together
The elements in the four views are shown to work
together seamlessly by the use of a small set of important scenarios ŌĆöinstances of more general use casesŌĆöfor which we describe the corresponding scripts
(sequences of interactions between objects, and between processes) as described by Rubin and Goldberg. The scenarios are in some sense an abstraction of the most important requirements. Their design is expressed using object scenario diagrams and object interaction diagrams
This view is redundant with the other ones (hence the ŌĆ£+1ŌĆØ), but it
serves two main purposes:
ŌĆó
as a driver to discover the
architectural elements during the architecture design as we will describe later
ŌĆó
as a validation and illustration
role after this architecture design is complete, both on paper and as the
starting point for the tests of an architectural prototype.
Notation for the Scenarios
The notation is very similar to the Logical view
for the components (cf. fig. 2), but uses the connectors of the Process view
for interactions between objects (cf. fig. 4). Note that object instances are
denoted with solid lines. As for the logical blueprint, we capture and manage
object scenario diagrams using Rational Rose.
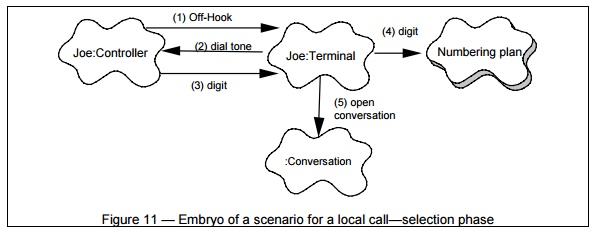
Example of a Scenario
Fig. 11 shows a fragment of a scenario for the small PABX. The
corresponding script reads:
1.
The controller of JoeŌĆÖs phone
detects and validate the transition from on-hook to off-hook and sends a
message to wake up the corresponding terminal object.
2.
The terminal allocates some
resources, and tells the controller to emit some dial-tone.
3.
The controller receives digits
and transmits them to the terminal.
4. The terminal uses the numbering plan to analyze the digit flow.
5. When a valid sequence of digits has been entered, the terminal opens a conversation.
Correspondence Between the Views
The various views are not fully orthogonal or
independent. Elements of one view are connected to elements in other views,
following certain design rules and heuristics.
From the logical to the process
view
We identify several important characteristics of the classes of the
logical architecture:
ŌĆó
Autonomy: are the objects active,
passive, protected?
-an active object takes the
initiative of invoking other objectsŌĆÖ operations or its own operations, and has
full control over the invocation of its own operations by other objects
-a passive object never
invokes spontaneously any operations and has no control over the invocation of
its own operations by other objects
- a protected
object never invokes spontaneously any operations but performs some arbitration
on the invocation of its operations.
ŌĆó
Persistence: are the objects
transient , permanent? Do they the failure of a process or processor?
ŌĆó
Subordination: are the existence
or persistence of an object depending on another object?
ŌĆó
Distribution: are the state or
the operations of an object accessible from many nodes in the physical
architecture, from several processes in the process
architecture?
In the logical view of the architecture we consider
each object as active, and potentially ŌĆ£concurrent,ŌĆØ i.e., behaving ŌĆ£in
parallelŌĆØ with other objects, and we pay no more attention to the exact degree
of concurrency we need to achieve this effect. Hence the logical architecture
takes into account only the functional aspect of the requirements.
However when we come to defining the process
architecture, implementing each object with its own thread of control (e.g.,
its own Unix process or Ada task) is not quite practical in the current state
of technology, because of the huge overhead this imposes. Moreover, if objects
are concurrent, there must be some form of arbitration for invoking their
operations.
On another hand, multiple threads of control are needed for several
reasons:
ŌĆó
To react rapidly to certain
classes of external stimuli, including time-related events
ŌĆó
To take advantage of multiple
CPUs in a node, or multiple nodes in a distributed system
ŌĆó
To increase the CPU utilization,
by allocating the CPU to other activities while some thread of control is
suspended waiting for some other activity to complete (e.g., access to some
external device, or access to some other active object)
ŌĆó
To prioritize activities (and
potentially improve responsiveness)
ŌĆó
To support system scalability
(with additional processes sharing the load)
ŌĆó
To separate concerns between
different areas of the software
ŌĆó
To achieve a higher system
availability (with backup processes)
We use concurrently two strategies to determine the
ŌĆśrightŌĆÖ amount of concurrency and define the set of processes that are needed.
Keeping in mind the set of potential physical target architectures, we can
proceed either:
ŌĆó
Inside-out:
Starting
from the logical architecture: define agent tasks which multiplex a single
thread of controlacross multiple active objects of a class; objects
whose persistency or life is subordinate to an active object are also executed
on that same agent; several classes that need to be executed in mutual
exclusion, or that require only small amount of processing share a single
agent. This clustering proceeds until we have reduced the processes to a
reasonably small number that still allows distribution and use of the physical
resources.
ŌĆó
Outside-in:
Starting with the physical architecture: identify external stimuli
(requests) to the system, define client processes to handle the stimuli and servers
processes that only provide services and do not initiate
them; use the data integrity and serialization
constraints of the problem to define the right set of servers, and allocate
objects to the client and servers agents; identify which objects must be
distributed.
The result is a mapping of classes (and their
objects) onto a set of tasks and processes of the process architecture.
Typically, there is an agent task for
an active class, with some variations: several agents for a given class to
increase throughput, or several classes mapped onto a single agent because
their operations are infrequently invoked or to guarantee sequential execution.
Note that this is not a linear, deterministic
process leading to an optimal process architecture; its requires a few
iterations to get an acceptable compromise.
There are numerous other ways to proceed, as shown by
Birman et al.5 or Witt et al.7 for example. The precise method used to construct the mapping is
outside of the scope of this article, but we can illustrate it on a small
example.
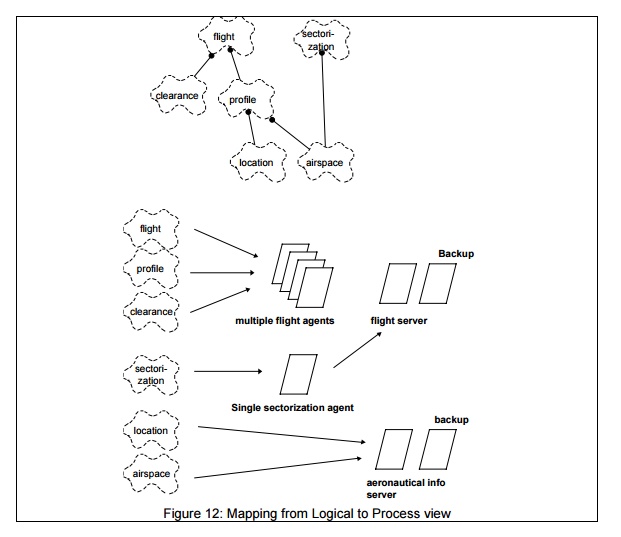
Fig. 12 shows how a small set of classes from some
hypothetical air-traffic control system maybe mapped onto processes.
The flight
class is mapped onto a set of flight
agents: there are many flights to process, a high rate of external stimuli,
response time is critical, the load must be spread across multiple CPUs.
Moreover the persistency and distribution aspects of the flight processing are
deferred to a flight server, which is
duplicated for availability reasons.
A flight profile
or a clearance are always subordinate
to a flight, and although there are complex classes, they share the processes
of the flight class. Flights are distributed to several other processes,
notably for to display and external interfaces.
A sectorization
class, which established a partitioning of airspace for the assignment of
jurisdiction of controllers over flights, because of its integrity constraints,
can be handled only by a single agent, but can share the server process with
the flight: updates are infrequent.
From logical to development
A class is usually implemented as a module, for example a type in the
visible part of an Ada package. Large
classes are decomposed into multiple packages. Collections of closely related
classesŌĆöclass categoriesŌĆö are grouped into subsystems. Additional constraints
must be considered for the definition of subsystems, such as team organization,
expected magnitude of code (typically 5K to 20K SLOC per subsystem), degree of
expected reuse and commonality, and strict layering principles (visibility
issues), release policy and configuration management. Therefore we usually end
up with a view that does not have a one to one correspondence with the logical
view.
The logical and development views are very close,
but address very different concerns. We have found that the larger the project,
the greater the distance between these views. Similarly for the process and
physical views: the larger the project, the greater the distance between the
views. For example, if we compare fig. 3b and fig. 6, there is no one to one
mapping of the class categories to the layers. If we take the ŌĆśExternal
interfacesŌĆöGatewayŌĆÖ category, its implementation is spread across several
layers: communications protocols are in subsystems in or below layer 1, general
gateway mechanisms are in subsystems in layer 2, and the actual specific
gateways in layer 5 subsystems.
From process to physical
Processes and process groups are mapped onto the available physical hardware, in various configurations for testing or deployment. Birman describes some very elaborate schemes for this mapping in the Isis project.
The scenarios relate mostly to the logical view, in terms of which classes are used, and to the process view when the interactions between objects involve more than one thread of control.Tailoring the Model
Not all software architecture need the full ŌĆ£4+1ŌĆØ
views. Views that are useless can be omitted from the architecture description,
such as the physical view, if there is only one processor, and the process view
if there is only process or program. For very small system, it is even possible
that the logical view and the development view are so similar that they do not
require separate descriptions. The scenarios are useful in all circumstances.
Iterative process
Witt et al. indicate 4 phases for the design or an architecture:
sketching, organizing, specifying and
optimizing, subdivided into some 12 steps. They indicate that some
backtracking may be needed. We think that this approach is too ŌĆ£linearŌĆØ for an
ambitious and rather unprecedented project. Too little is known at the end of
the 4 phases to validate the architecture. We advocate a more iterative
development, were the architecture is actually prototyped, tested, measured,
analyzed, and then refined in subsequent iterations. Besides allowing to
mitigate the risks associated with the architecture, such an approach has other
side benefits for the project: team building, training, acquaintance with the
architecture, acquisition of tools, run-in of procedures and tools, etc. (We
are speaking here of an evolutionary prototype, that slowly grows into becoming
the system, and not of throw-away, exploratory prototypes.) This iterative
approach also allows the requirements to be refined, matured, better
understood.
A scenario-driven approach
The most critical functionality of the system is
captured in the form of scenarios (or use cases). By critical we mean:
functions that are the most important, the raison
dŌĆÖ├¬tre of the system, or that have the highest frequency of use, or that
present some significant technical risk that must be mitigated.
Start:
ŌĆó
A small number of the scenarios
are chosen for an iteration based on risk and criticality. Scenarios may be
synthesized to abstract a number of user requirements.
ŌĆó
A strawman architecture is put in
place. The scenarios are then ŌĆ£scriptedŌĆØ in order to identify major
abstractions (classes, mechanisms, processes, subsystems) as indicated by Rubin
and Goldberg ŌĆö decomposed in sequences of pairs (object, operation).
ŌĆó
The architectural elements
discovered are laid out on the 4 blueprints: logical, process, development, and
physical.
ŌĆó
This architecture is then
implemented, tested, measured, and this analysis may detect some flaws or
potential enhancement.
ŌĆó
Lessons learned are captured.
Loop:
The next iteration can then start by:
ŌĆó
reassessing the risks,
ŌĆó
extending the palette of
scenarios to consider
ŌĆó
selecting a few additional
scenarios that will allow risk mitigation or greater architecture
coverage Then:
ŌĆó
Try to script those scenarios in
the preliminary architecture
ŌĆó
discover additional architectural
elements, or sometimes significant architectural changes that need to occur to
accommodate these scenarios
ŌĆó
update the 4 main blueprints:
logical, process, development, physical
ŌĆó
revise the existing scenarios
based on the changes
ŌĆó
upgrade the implementation (the
architectural prototype) to support the new extended set of scenario.
ŌĆó
Test. Measure under load, in real
target environment if possible.
ŌĆó
All five blueprints are then
reviewed to detect potential for simplification, reuse, commonality.
ŌĆó
Design guidelines and rationale
are updated.
ŌĆó
Capture the lessons learned.
End loop
The duration of these iterations varies considerably: with the size of the project to put in place,
with the number of people involved
and their familiarity with the domain and with the method, and with the degree of ŌĆ£unprecedentednessŌĆØ of the
system w.r.t. this development organization. Hence the duration of an iteration may be 2-3 weeks for a small
project (e.g., 10 KSLOC), or up to 6-9 months for a large command and control
system (e.g., 700 KSLOC).
Documenting
the architecture
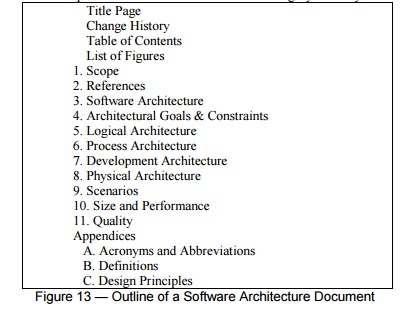
The documentation produced during the architectural
design is captured in two documents:
ŌĆó
A Software Architecture Document, whose organization follows closely
the ŌĆ£4+1ŌĆØ views (cf. fig. 13 for a typical outline)
Related Topics