Chapter: Signals and Systems : Linear Time Invariant Discrete Time Systems
Sample Problems and Important Short Answers: Linear Time Invariant Discrete Time Systems
1. States the properties of
convolution
i).Commutative
property of convolution
x(n) ∗h(n)=h(n) ∗x(n)=y(n)
ii).Associative
property of convolution
[x(n) ∗h1(n)] ∗ h2(n)=x(n )∗[ h1(n).
h2(n)]
iii).Distributive
property of convolution
x(n) ∗[ h1(n)+ h2(n)]
=x(n) ∗
h1(n)+x(n)
∗ h2(n).
2. Define non recursive and recursive of the
following system.
When the
output y(n) of the system depends upon present and past inputs then it is
called non-recursive system. When the output y(n) of the system depends upon
present and past inputs as well as past outputs, then it is called recursive
system.
3.
Define
convolution sum?
If x(n)
and h(n) are discrete variable functions, then its convolution sum
y(n) is
given by,
y(n)=_
x(k) h(n-k)
4. If x(n) and y(n) are discrete variable
functions, what is its convolution sum.
The
convolution sum is,

5.
Determine
the system function of the discrete time system described by the difference
equation.
Y(n) = 0.5y(n-1)+x(n)
Taking
z-transform of both sides,
Y(z) =
0.5z-1Y(z)+X(z)
H(z) =
Y(z)/X(z) = 1/(1 – 0.5z -1)
6.
A causal
LTI system has impulse response h(n), for which the z-transform is H(z) = (1+z-1)/(1-0.5z-1)(1+0.25z-1).
Is the system stable? Explain.
H(z) can
be written in terms of positive powers of z as follows:
H(z) =
z(z+1)/(z-0.5)(z+0.25)
Poles are
at p1 =0.5 and p2 = -0.25. Since both the poles are
inside unit circle. This system is stable.
7. Check whether the system with system
function H(Z) = (1/1-0.5z-1)+(1/1-2z-1) with ROC |z| <
0.5 is causal and stable?
H(z) =
z/(z – 0.5) + z/(z - 2). Poles of this sys tem are located at z = 0.5 and z =
2. This system is not causal and stable, since all poles are not located inside
unit circle.
8. Is the discrete time system described by
the difference equation y(n) = x(-n) is causal?
Here
y(-2) = x(-(-2)) = x(2). This means output at n=-2 depends upon future inputs.
Hence this system is not causal.
9. Consider a system whose impulse is h(t) = e-|t|.
Is this system is causal or non causal?
Here h(t)
= e-|t|
=e-t for t>=0
=et for t<0
Since
h(t) is not equal to zero for t<0, the system is non causal.
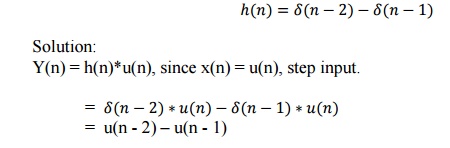
10. Find the step response of the system if the
impulse response
10.
Obtain
the convolution of
x(n)*[h1(n)+h2(2)]
= x(n)*h1(n) + x(n)*h2(n)
12.
List the
steps involved in finding convolution sum?
o folding
o
Shifting
o Multiplication
o Summation
13.
Consider an LTI system with impulse response h(n)= δ(n-*“) for an
input x(n), find the Y(ejω).
Here is
the spectrum of output. By convolution theorem we can write,

14.
List the
properties of convolution?
o
Commutative property of convolution
x(n) *
h(n) = h(n) * x(n) = y(n)
o
Associative property of convolution
[ x(n) *
h1(n)] * h2(n) = x(n) * [h1(n) * h2(n)]
o
Distributive property of convolution
x(n) * [h1(n)
+ h2(n)] = x(n) * h1(n) + x(n) * h2(n)
15.
Define
system function?
H(z)=
Y(z) is called system function.It is the z transform of the unit sample X(Z)
response h(n) of the system.
Sample Problems:
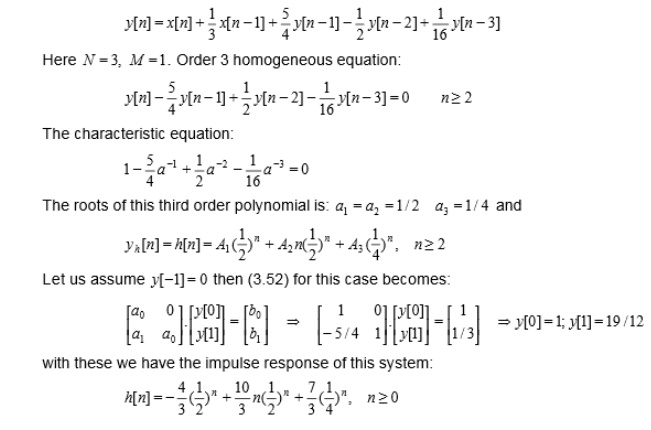
1. Consider the system described by the difference equation.
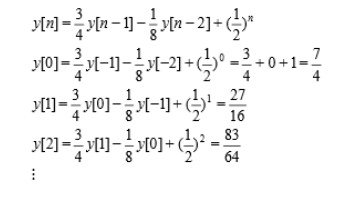
2. Given y[-1]=1 and y[-2]=0. Compute recursively a few terms of the following 2nd order DE:
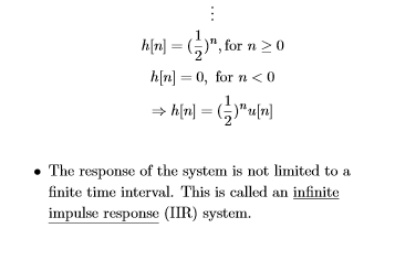
3. Compute the impulse response of the system described by,

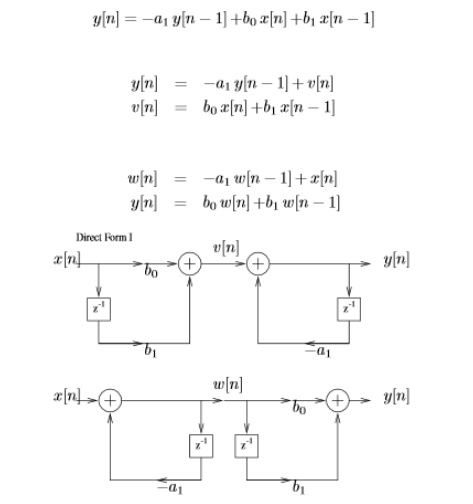
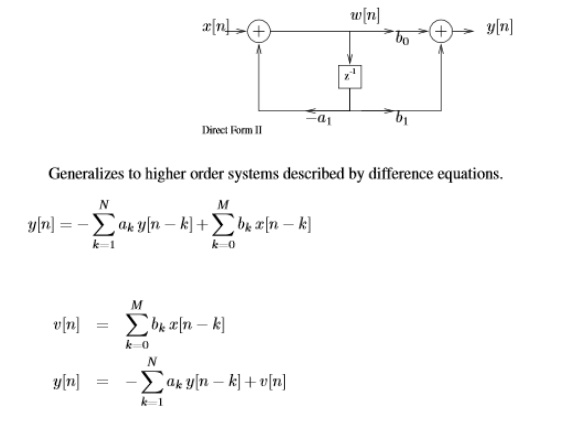
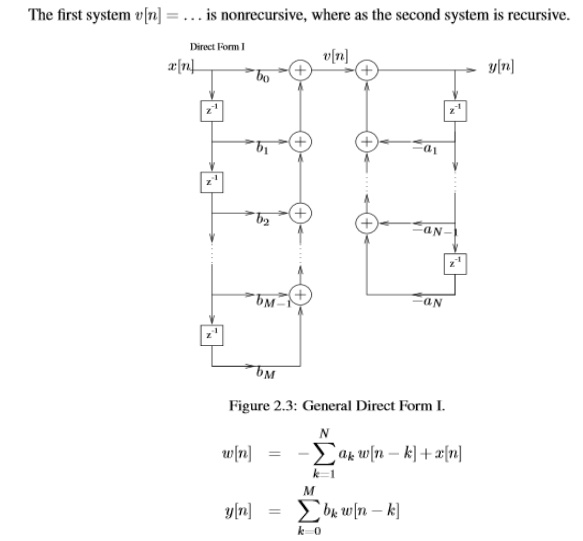
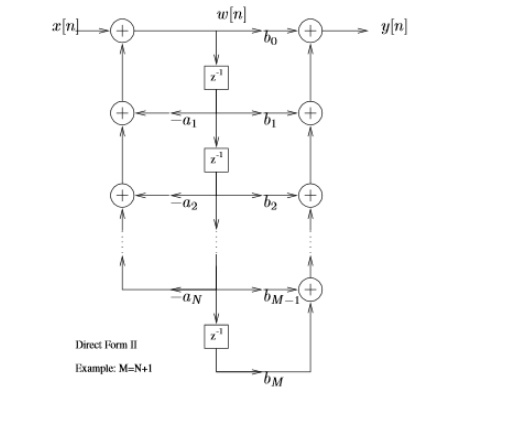
4. Obtain the structures realization of LTI system
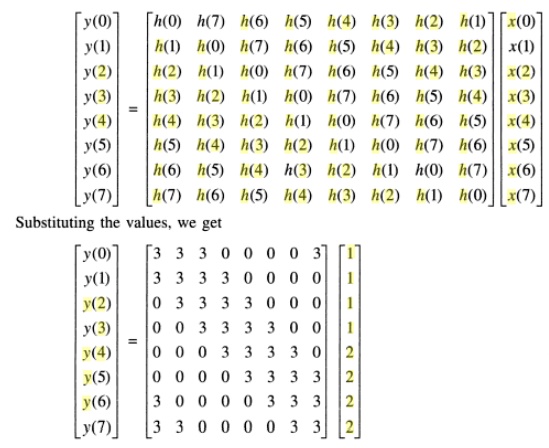
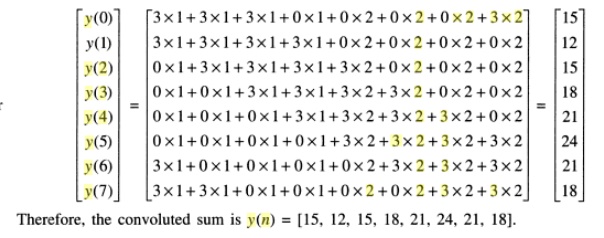
5. Find the convolution of x(n)=[1,1,1,1,2,2,2,2] with h(n)=[3,3,0,0,0,0,3,3] by using matrix method.
Solution: By using matrix method, N=8
Related Topics