Chapter: Automation, Production Systems, and Computer Integrated Manufacturing : Industrial Control Systems
Computer Process Control
COMPUTER PROCESS CONTROL
Computer Process Control
• Control Requirements
• Capabilities of Computer Control
• levels of Industrial Process Control
The use
of digital computers to control industrial processes had its origins in the
continuous process industries in the late 1950s (Historical Note 4.1). Prior to
then, analog controllers were used to implement continuous control, and relay
systems were used to implement discrete control. At that time, computer
technology was in its infancy, and the only computers available for process
control were large, expensive mainframes. Compared with today's technology, the
digital computers of the 195Ch;were slow, unreliable, and not well suited to
process control applications. The computers that were installed sometimes cost
more than the processes they controlled. Around 1960, digital computers started
replacing analog controllers in continuous process control applications; and
around 1970, programmable logic controllers started replacing relay hanks in
discrete control applications. Advances III computer
technology Since the 1960s and 1970.~have resulted in the de:elopm~nl of the
microprocessor. Today, virtually all industrial processes, certainly new
installations, are controlled by digital computers based on microprocessor
technology. Microprocessorbased controllers are discussed in Section 4.4.6.
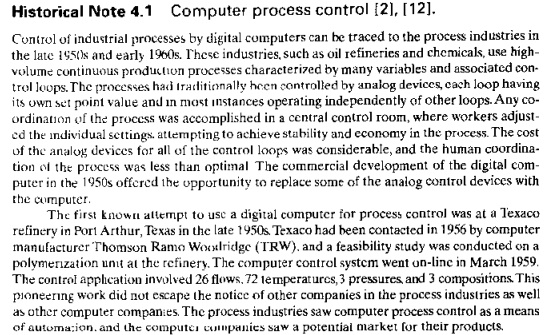
The available computers In the late I950s were not
reliable, and most of the subsequent process control installations operated by
euher printing out instructions for the operator or by making adi\lstments in
the set points (If analog
controllers, thereby reducing the risk of process downtime due to compute:
problems. The latter mode of operation was called set point conlrol. By March 1%1, a total of 37 computer process
control systems had been installed. Much experience
was gamed from these early installations. The interrupt feature (Section 4.3.2). by which the computer suspends
current program execution to quickly respond to a process need. was developed
during this period.
The first direct
digitai control (DOC) system
(Section 4.4.2), in which certain analog de" vices are replaced by the
computer, was installed by Imperial Chemical Industries in England in 1%2. In
this onplementauon.zza process variables were measured, and 129actuators
(valves) wcr~ controlledImprovements in DOC technology were made, and
additional systems were installed during thc 1%0s. Advantages 01 DOC noted
during this time included: (1) cost savings from elimination of an~l"g
instrumentationfor large systems. (2) simplified operator dis_ play pencts, and
,:3) flexibility through reprogramming capability.
Computer
technology was advancing. leading to the development of the minicomputer
in thelate 1960s.Process cnntrol applications were
easier to justify using theses maller, lessexpensive computers. Development of
the microcomputer in the early 1970s
continued this trend. Lower cost process conlrol hardware and Interface
equipment (such as analogtodlgltal converters) were becoming available due to
the larger markets made possible by lowcost computer controllers.
Most of the developments in computer process control up to this time were biased toward theprocessinduslriesrath",rthandiscretc part and product manufacturing. Just as analog devices had been used to automate process industry operations, relay banks were widely used to satisfy the ciscrcte process control (ON/OFF) requirements in manufacturing automation.
Let us consider the requirements
placed on the computer in industrial control applications. We then examine the
capabilities that have been incorporated into the control computer to address
these requirements. and finally we observe the hierarchical structure of the
functions performed by the control computer.
Control
Requirements
Whether
the application involves continuous control, discrete control. or both, there
are certain basic requirements that tend to he common to nearly all process
control applications. By and large, they are concerned with the need to
communicate and interact with the process on arealtime basis.A reallime controller is able to respond
to the process within a short enough time period that process performance is
not degraded. Factors that determine whether a computer controller can operate
in realtime include: (1) the speed of the controller's central processing unit
(CPU) and its interfaces, (2) the controller's operating system, (3) the design
of the application software, and (4) the number of different input/out. put
events to which the controlier is designed to respond. Realtime control usually
requires the controller to be capable of multitasking,
which means coping with multiple tasks concurrently without the tasks
interfering with one another.
There are two basic requirements that must be
managed by the controller to achieve realtimeeontrol:
Processinitiated interrupts. The
controller must be able to respond to incoming signals from the process.
Depending on the relative importance of the signals, the computer may need to
interrupt execution of a current program to service a higher priority need of
the process. A processinitiated interrupt is often triggered by abnormal
operating conditions, indicating that some corrective action must be taken
promptly.
Timerinitialed actions. The controller must be capable of executing certain actions at specified points in time. Timerinitiated actions can be generated at regular time intervals,ranging from very low values (e.g., 100 j.ts) to several minutes. or they can be generated at distinct points in time. Typical timerinitiated actions in process control include: (1) scanning sensor values from the process at regular sampling intervals, (2) turning on and off switches, motors, and other binary devices associated with the process at discrete points in time during the work cycle, (3) displaying performance data on the operator's console at regular times during a production run, and (4) recomputing optimal process parameter values at specified times.
These two requirements correspond to the two types
of changes mentioned previously in the context of discrete control systems: (l)
eventdriven changes and (2) timedriven changes.
In addition to these basic requirements. the
control computer must also deal with other types of interruptions and events.
These include:
Computer
commands to process. In addition to incoming signals from the process, the control computer must be able to
send control signals to the process to accomor readjust a 5ct point in 5iyrtem and programmitiated IT('nts. These are events related to the
computer systerri itself 'lhcv arc similar to the kinds of corr.puter
operations associated with business and eng:ineering applications of computers.
A systeminitiated event involves
communications among ~ompl!ten and peripher<ll devices linked together in a
network. In these multiple computer networks, feedback signals, control
commands, and other data must be transferred back and forth among the computers
in the overall control of the process. A programinitiated
{'vent is when some nonprocessrelated action is called for in the program.such
as the pr.ntiug or display of reports on a printer or monitor. In process
coutrut, vvstern and programinitiated events generally occupya low level of
priority compared with process interrupts, commands to the process. and
timerinitiated events

Capabilities of Computer Control
The above requirements can he satisfied by
providing the controller with certain capabttitics that allow it 10 interact on
a realtime basis with the process and the operator, The capabilities are: (1)
polling, (2) interlocks. (3) interrupt system, and (4) exception handling.
Polling (Data Sampling). In
computer process control,polllNg refers 10
the periodic ~ampling of data that indicates the status of the process. When
the data consist of a continuous analog ~ignal. sampling means that the continuous
slgnalrs substituted with a series of numerical values that represent the
continuous signal at discrete moments in time. The same kind of substitution
holds for discrete data. except that the number of possible numerical values
the data can take on i~more
limitedccertainly the case with binary data We discuss the techniques by which
continuous and discrete datil are entered into and transmitted from the
computer in Chapter 5. Other names used for polling include sampling and scanning
In some polling procedure simply requests whether
any changes have the last polling cycle and then collects only the new data
from shorten the cycle time required for polling. Issues related to

Polling order. The polling order is the sequence
in which the different data collection points
of the process are sampled.
Polling formal. This
refers to the manner in which the sampling procedure is designed. The
alternatives include: (a) entering all new data from all sensors and other
devices ~very polling cycle; (b) updating the control system only with data
that have changed since the last polling cycle; or (c) using highlevel and towlevdscanntng.ot conditional scanning, in which only
certain key data are normally collected each polling cycle (highlevel
scanning), but if the data indicates some irregularity in the process. a
lowlevel scan i~undertaken
to collect morecomplete data to ascertain the source of the irregularity.
These issues become increasingly critical with very
dynamic processes in which changes in process S(;JIII, occur rapidly
Interlocks. An inrerlock is a safeguard mechanism for
coordinating the activities of two or more devices and
preventing vue device from interfering with the otherts). In process control.
interlocks provide a means by which the controller is able to sequence the
activities in a work cell, ensuring that the actions of one piece of equipment
arc completed before the next piece of equipment begins its activity.
Interlocks work by regulating the flow of control signals back and forth
between the controller and the external devices.
There are two types of interlocks, input interlocks
and output interlocks, where input and output are defined relative to the
controller. An input interlock is a
signal that originates from an external device (e.g., a limit switch, sensor,
or production machine) and is sent to the controller. Input interlocks can be
used for either of the following functions:
To proceed with the execution of the work
cycle program. For example, the production machine communicates a signal to the
controller that it has completed its processing of the part. This signal
constitutes an input interlock indicating that the controller can now proceed
to the next step in the work cycle, which is to unload the part.
To interrupt the execution of the work
cycle program. For example, while unloading the part from the machine, the
robot accidentally drops the part. The sensor in its gripper transmits an
interlock signal to the controller indicating that the regular work cycle sequence
should be interrupted until corrective action is taken.
An output
interlock is a signal sent from the controller to some external device. It
is used to control the activities of each external device and to coordinate its
operation with that of the other equipment in the cell. For example, an output
interlock can be used to send a control signal to a production machine to begin
its automatic cycle after the workpart has been loaded into it.
lnterrupt System. Closely
related to interlocks is the interrupt system. As suggested by our discussion
of input interlocks, there are occasions when it becomes necessary for the
process or operator to interrupt the regular controller operation to deal with
morepressing matters. All computer systems are capable of being interrupted; if
nothing else, by turning off the power. A moresophisticated interrupt system is
required for process control applications. An interrupt system is a computer control feature that permits the
execution of the current program to be suspended to execute another program or
subroutine in response to an incoming signal indicating a higher priority
event. Upon receipt of an interrupt signal, the computer system transfers to a
predetermined subroutine designed to deal with the specific interrupt. The
status of the current program is remembered so that its execution can be
resumed when servicing of the interrupt has been completed.
Interrupt conditions can be classified as internal
or externaL Internal interrupts are
generated hy the computer system itself. These include timerinitiated events,
such as polling
of data from sensors connected to the process, or
sending commands to the process at specific points 10 clock time. System and
programinitiated interrupts are also classified as
important programs higher priority) Be executed
before Jessimportant programs (ones with lower prioruiesj.Thc system designer
must decide what level of priority should be attached to each control function.
A higher priority function can interrupt a lower primity function. A function
at a given priority level cannot interrupt a function at the same priority
level. The number of priority levels and the relative importance of the
functiom depend on the l<:'[uir<:I1n;nl>of the individual process
control situation. For example, emergency shutdown of a process because of
safety hazards would occupy a very high priority level, even though it may be
an operator. initiated interrupt. Most operator in" puts would have low
priorities.
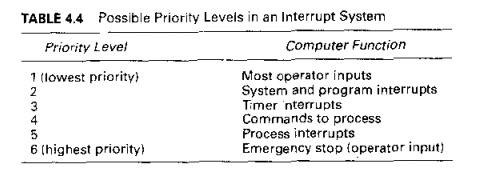
One possible organization of priority rankings for
process control functions is shown IIITable 4.4. Of course, the priority system
may have more or less than the number of levcis shown here. depending on the
control situation. For example, some process interrupts may be more important
than others. and some system interrupts may take precedence over certain
process interrupts, thus requiring more than the six levels indicated in our
table
To respond 10 the various levels of priority
defined for a given control application, an interrupt system can have one or
more interrupt levels. A singlelevel
interrupt system has only two modes of operation: normal mode and
interrupt mode. The normal mode can be interrupted, but the interrupt mode
cannot. This means that overlapping interrupts arc serviced on a firstcome.
firstserved basis, which cOllld have potentially hazardous consequences it an
important process interrupt was forced to wait its tum while a series of
lessimportant operator and system interrupts were serviced. A multilevel interrupt system has a normal
operating mode plus more than one interrupt level. The normal mode can be
interrupted hy any interrupt level. hut the interrupt levels have relative priorities
that determine which functions can interrupt others. EXample 4.1 illustrates
the difference between the singlelevel and multilevel interrupt systems.
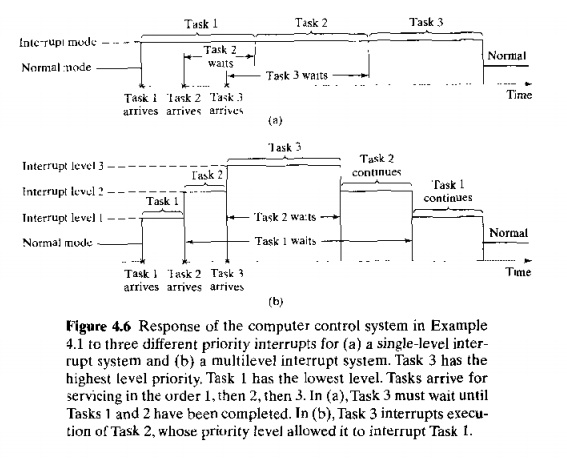
EXAMPLE 4.1 SingleLevel Versus Multilevel Interrupt
Systems
Three
Interrupts representing tasks of three different priority levels arrive for
service in the reverse order of (heir respective priorities. Task 1with the
lowest priority, arrives first. Shortly later.higher priority Task 2 arrives.
And shortly later,
highest pnority Task 3 arrives. How would the
computer control system respond under (a) a suvglcle ce! interrupt system and
(b) a rnurt'ilevcl interrupt system?
Exception
Handling. In process control, an exception is
an even! that is outside the norma!
or desired operation of the process or control system. Dealing with the
exception is an essential function in industrial process control and generally
occupies a major portion of the control algorithm. The need for exception
handling may be indicated through the normal polling procedure or by the
interrupt system. Examples of events that may invoke exception handling
routines include:
product quality
problem
process variables
operating outside their
normal ranges
shortage of raw materials or supplies
necessary to sustain the process
hazardous conditions
such as a fire
controller malfunction
In effect, exception handling is a form of error
detection and recovery, discussed in the context of advanced automation
capabilities (Section 3.2.3).
Levels of Industrial Process Control
In general. industrial control systems possess a
hierarchical structure consisting of multiple levels of functions, similar to
our levels of automation described in the previous chap. ter [Table 4.2). ANSIIISAS88.011995J [1]
divides process control functions into three
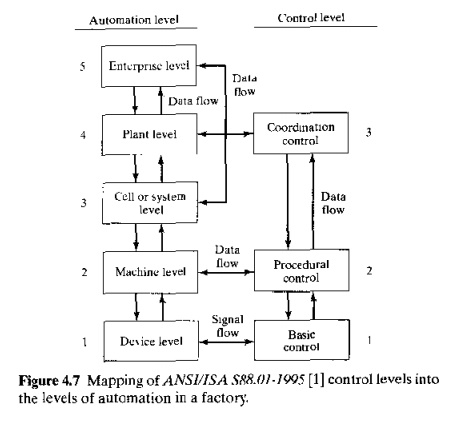
levels:
(1) basic control, (2) procedural control, and (3) coordination contro1.These
control levels map into our automation hierarchy as shown in Figure 4.7, We now
describe the three control levels, perhaps adapting the standard to fit our own
models of continuous and discrete control (the reader is referred to the
original standard [1], available from the Instrument Society of America)
Basic
Control. This is the lowest level of control defined in the standard,
corresponding to the device level in our automation hierarchy. In the process
industries, this level is concerned with feedback control in the basic control
loops. In the discrete manufacturing industries, basic control is concerned
with directing the servomotors and other actuators of the production machines.
Basic control includes functions such as feedback control. polling,
interlocking, interrupts. and certain exception handling actions. Basic control
functions may be activated.deactivated, or modified by either of the higher
control levcis (procedural or coordination control) or by operator commands.
Procedural Control. This
intermediate level of control maps into regulatory control of unit operations
in the process industries and into the machine level in discrete manufacturing
automation (Table 4.2). In continuous control, procedural control functions
include using data collected during polling to compute some process parameter
value, changing serpoints and other process parameters in basic control, and
changing controller gain constants, In discrete control, the functions are
concerned with executing the work cycle program, that is.directing the machine
to perform actions in an ordered sequence to accomplish sornc productive task. PI ocedural control may also
involve executing error detection and recovery procedures and making decisions
regarding safety hazards that occur during the process,
Coordination Control. This is
the highest level in the control hierarchy in the A'JSI/ISA standard. It
corresponds to the supervisor} level in the process industries and the cell or
system level in discrete manufacturing. It is also likely to involve the plant
and possibly the enterprise levels of automation. Coordination control
initiates, directs, or alters the execution of programs at the procedural
control level. Its actions and outcomes change over rime. as in procedural
control. but its control algorithms are not stnleturoo for a specific processoriented
task. It IS more reactive and adaptive. Functions of coordination control at
the celllevel include.coordinating the actions of groups of equipment or
machines.coordinating material handling activities between machines in a cell
or system, allocating production orders to machines in the cell, and selecting
among alternative work cycle programs.
At the plant and enterprise levels. coordination
control is concerned with manufacturing support functions, including production
planning and scheduling; coordinating common resources. such as equipment used
in more than one production cell; and supervising availability, utilization.
and capacity of equipment. These control functions are accomplished through the
company's integrated computer and information system.
Related Topics