Chapter: Civil Surveying : Advanced Topics in Surveying
Reduction of soundings with a example
Reduction of soundings with a example
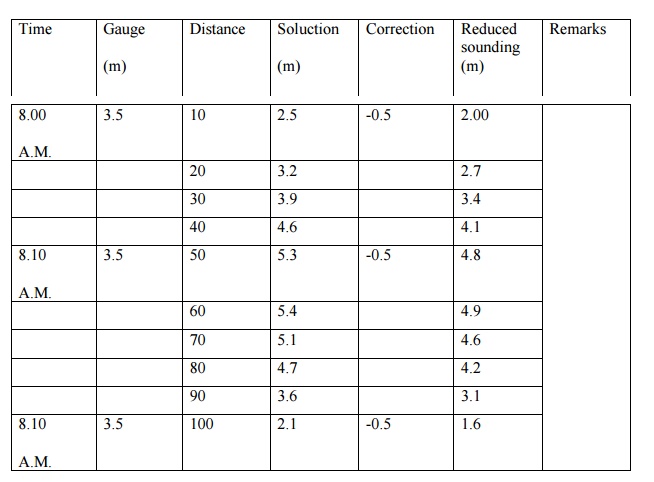
The reduced soundings are the
reduced levels of the sub-marine surface in terms of the adopted datum. When
the soundings are taken, the depth of water is measured with reference to the
existing water level at that time. If the gauge readings are also taken at the
same time, the soundings can be reduced to a common unvarying datum. The datum
most commonly adopted is the 'mean level of low water of
spring tides' and is written either as
L.W.O.S.T.
(low water, ordinary spring tides) or
M.L.W.S. (mean low water springs). For reducing
the soundings, a correction equal to the difference of level between the actual
water level (read by gauges) and the datum is applied to the observed
soundings, as illustrated in the table given below :
Gauge Reading at L.W.O.S.T. = 3.0 m.
What is
three point problem ?How it can be solved ?
Given the
three shore signals A, B and C, and the angles ? and ?
subtended by AP, BP
and CP at
the boat P, it is required to plot the position of P
1. Mechanical Solution
(i) By
Tracing Paper
Protract angles ? and ? between
three radiating lines from any point on a piece of tracing paper. Plot the
positions of signals A, B, C on the plan. Applying the tracing paper to the
plan, move it about until all the three rays simultaneously pass through A, B
and C. The apex of the angles is then the position of P which can be pricked
through.
(ii) By
Station Pointer :
The station pointer is a three-armed protractor
and consists of a graduated circle with fixed arm and two movable arms to the
either side of the fixed arm. All the three arms have beveled or fiducial
edges. The fiducial edge of the central fixed arm corresponds to the zero of
the circle. The fiducial edges of the two moving arms can be set to any desired
reading and can be clamped in position. They are also provided with verniers
and slow motion screws to set the angle very precisely. To plot position of P,
the movable arms are clamped to read the angles ? and ? very
precisely. The station pointer is then moved on the plan till the three
fiducial edges simultaneously touch A, B and C. The centre of the pointer then
represents the position of P which can be recorded by a prick mark.
2.
Graphical Solutions
(a) First
Method :
Let a, b and c be the plotted positions of the
shore signals A, B and C respectively and let ? and ? be the
angles subtended at the boat. The point p of the boat position p can be
obtained as under :
1. Join a
and c.
2. At a,
draw ad making an angle ? with ac. At c, draw cd making an
angle ? with ca.
Let both these lines meet at d.
3. Draw a
circle passing through the points a, d and c.
4. Join d
and b, and prolong it to meet the circle at the point p which is the required
position of the boat.
Proof.
From the properties of a circle,
apd = acd = ? and cpd = cad = ?
which is
the required condition for the solution.
(b)
Second Method :
Join ab
and bc.
1. From a
and b, draw lines ao1 and bo1 each making an angle (90 o - ?) with ab
on the side towards p. Let them intersect at 01.
2. Similarly,
from b and c, draw lines ================ each making an angle (90 o - ?)
with
ab on the side towards p. Let them intersect at --.
With - as the
centre, draw a circle to pass through a and b. Similarly, with - as the
centre draw a circle to pass through b and c. Let both the circles intersect
each other at a point p. p is then the required position of the boat.
Proof. ao1b = 180 o - 2 (90 o - ?) = 2?
apb = � ao1b
= ?
Similarly, bo2c = 180 o - 2 (90 o - ?) = 2?
And bpc = � bo2c
= ?.
The above
method is sometimes known as the method of two intersecting circles.
(c)Third
Method :
1. Join ab
and bc.
2. At a and
c, erect perpendiculars ad and ce.
3. At b,
draw a line bd subtending angle (90 o - ?) with ba,
to meet the perpendicular through a in d.
4. Similarly,
draw a line be subtending an angle (90 o - ?) with bc,
to meet the perpendicular through c in e.
5. Join d
and e.
6. Drop a
perpendicular on de from b. The foot of the perpendicular (i.e. p) is then the
required position of the boat.
Related Topics