Chapter: Network Programming and Management : Advanced Sockets
Threads
THREADS
When a process needs something to be performed
by another entity, it forks a child process and lets the child perform
processing. (similar to concurrent server program.) The problem associated with
this are:
a. All descriptors are copied from parent to child
thereby occupying more memory.
b. Inter process communication requires to pass
information between the parent and child after each fork. Returning the
information form the child to parent takes more work.
Threads being a light weight process help to overcome
these drawbacks. However, as they share the same variables – known as global
variables - they need to be synchronized to avoid errors. IN addition to these
variables, threads also share
• Process instructions
• Data,
• Open files
• Signal handlers and signal dispositions
• Current working directory
• User Groups Ids.
Each thread has its own thread ID, set of
registers, program counter and stack pointer, stack, errno, signal mask and
priority.
Basic thread functions: pthread_create
function:
int ptheread_create (pthread_t) *tid, const
pthread_attr_t *attr, void * (*func)
(*void), void *arg );
tid : is the thread ID whose data type is
pthread_t - unsigned integer. ON successful creation of thread, its ID is
returned through the pointer tid.
pthread_atttr_t : Each thread has a number of
attributes – priority, initi8al stack size, whether is demon thread or not. If
this variable is specified, it overrides the default. To accept the default,
attr argument is set to null pointer.
*func : When the thread is created, a function
is specified for it to execute. The thread starts by calling this function and
then terminates either explicitly (by calling pthread_exit) or implicitly by
letting this function to return. The address of the function is specified as
the func argument. And this function is called with a single
pointer argument, arg. If multiple arguments
are to be passed, the address of the structure can be passed
The function takes one argument – a generic
pointer (void *) and returns a generic pointer ( void *). This lets us to pass
one pointer to the thread and return one pointer.
The return is normally 0 if OK or nonzero on an
error
pthread_join function
:
int pthread_join (pthread_t tid, void ** status )
We can wait for a given thread
to terminate by calling pthread_join . We must
specify the tid of the thread that we wish to
wait for. If the status pointer is non null, the return value from the thread
is stored in the location pointed to by status.
pthread_self function
: Each thread has an ID that identifies it within a given process. The thread ID is returned by pthread_create. This
function fetches this value for itself by using this function:
pthread_t pthread_self(void);
pthread_detach function :
A thread
is joinable (the default) or detached. When a joinable thread terminates, its
thread ID and exit status are retained until thread calls pthread_join(). But a detached thread for example daemon thread-
when it terminates all its resources are released and we cannot wait for it
terminate.
When one
thread needs to know when another thread terminates, it is best to leave the
thread joinable.
Int pthread_detach (pthread_t tid);
pthread_exit function:
One way for the thread to terminate is to call pthread_exit().
void pthread_exit (void
*status);
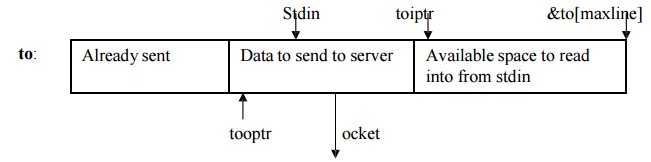
The str_cli function uses fputs and the fgets
to write to and read from the server. While doing so, fgets my be putting the
data from stdin into the buffer
wherein already there is data waiting to be writen. This will block the other processes as the function is waiting to write the
pending data. If there is data to be
read form the server by the function readen at the client, it will be blocked. Similarly, if a line of input is available
from the socket we can block in the
subsequent call to fputs, if the standard
output is slower thant the network. IN such situation non blocking
methods are used. This requires creating elaborate arrangement of buffer management: where
pointer are used to find the data that
is already sent, data that are yet to be sent and available space in the read
buffer. As shown below:
The program comes
to be about 100 lines . This can be reduced by using threads. In this, call to
pthread is given in the main function where in the fgets function are invoked. When the thread returns, fputs is invoked.
Mutexes: Mutual Exclusion
Notice the following Figure1.a that when a
thread terminates, the main loop decrements both nconn and nlefttoread. We
could have placed these two decrements in the function do_get_read, letting
each thread decrement these two counters immediately before the thread
terminates. But this would be a subtle, yet significant, concurrent programming
error.
threads/web01.c
while (nlefttoread > 0) {
while (nconn < maxnconn &&
nlefttoconn > 0) {
/* find a file to read */
for (i = 0; i < nfiles; i++)
if (file[i].f_flags == 0)
break;
if (i == nfiles)
err_quit("nlefttoconn = %d but nothing
found", nlefttoconn);
file[i].f_flags = F_CONNECTING;
Pthread_create(&tid, NULL,
&do_get_read, &file[i]);
file[i].f_tid = tid;
nconn++;
nlefttoconn--;
}
if ( (n = thr_join(0, &tid, (void **)
&fptr)) != 0)
errno = n, err_sys("thr_join error");
nconn--;
nlefttoread--;
printf("thread id %d for %s done\n",
tid, fptr->f_name);
}
exit(0);
}
The problem with placing the code in the
function that each thread executes is that these two variables are global, not
thread-specific. If one thread is in the middle of decrementing a variable,
that thread is suspended, and if another thread executes and decrements the
same variable, an error can result. For example, assume that the C compiler
turns the decrement operator into three instructions: load from memory into a
register, decrement the register, and store from the register into memory. Consider
the following possible scenario:
Thread A is running and it loads the value of
nconn (3) into a register.
The system switches threads from A to B. A's
registers are saved, and B's registers are restored.
Thread B executes the three instructions corresponding
to the C expression nconn--,
Sometime later, the system switches threads
from B to A. A's registers are restored and A continues where it left off, at
the second machine instruction in the three-instructionsequence. The value of
the register is decremented from 3 to 2, and the value of 2 is stored in nconn.
The end result is that nconn is 2 when it
should be 1. This is wrong.
These types of concurrent programming errors
are hard to find for numerous reasons. First, they occur rarely. Nevertheless,
it is an error and it will fail (Murphy's Law). Second, the error is hard to
duplicate since it depends on the nondeterministic timing of many events.
Lastly, on some systems,the hardware instructions might be atomic; that is,
there might be a hardware instruction to decrement an integer in memory
(instead of the three-instruction sequence we assumed above) and the hardware
cannot be interrupted during this instruction. But, this is not guaranteed by
all systems, so the code works on one system but not on another.
We call threads programming concurrent
programming, or parallel programming, since multiple threads can be running
concurrently (in parallel), accessing the same variables. While the error
scenario we just discussed assumes a single-CPU system, the potential for error
also exists if threads A and B are running at the same time on different CPUs
on a multiprocessor system. With normal Unix programming, we do not encounter
these concurrent programming problems because with fork, nothing besides descriptors
is shared between the parent and child. We will, however, encounter this same
type of problem when we discuss shared memory between processes.
We can easily demonstrate this problem with
threads. Figure 2 is a simple program that creates two threads and then has
each thread increment a global variable 5,000 times.
We exacerbate the potential for a problem by
fetching the current value of counter, printing the new value, and then storing
the new value. If we run this program, we have the output shown in Figure 1.b.
Figure 2
Two threads that increment a global variable incorrectly.
threads/example01.c
1
#include "unpthread.h"
2 #define NLOOP 5000
3 int counter; /*
incremented by threads */
4 void *doit(void *);
5 int
6 main(int argc, char **argv)
7 {
8
pthread_t
tidA, tidB;
9 Pthread_create(&tidA, NULL, &doit, NULL);
10
Pthread_create(&tidB,
NULL, &doit, NULL);
11
/* wait
for both threads to terminate */
12
Pthread_join(tidA,
NULL);
13
Pthread_join(tidB,
NULL);
14
exit(0);
15 }
16 void *
17 doit(void *vptr)
18 {
19 int i,
val;
20
/*
21
* Each
thread fetches, prints, and increments the counter NLOOP times.
22
* The
value of the counter should increase monotonically.
23
*/
24
for (i =
0; i < NLOOP; i++) {
25
val =
counter;
26
printf("%d:
%d\n", pthread_self(), val + 1);
27
counter
= val + 1;
28
}
29
return
(NULL);
}
Notice the error the first time the system
switches from thread 4 to thread 5: The value 518 i sstored by each thread.
This happens numerous times through the 10,000 lines of output.
The nondeterministic nature of this type of problem
is also evident if we run the program a few times: Each time, the end result is
different from the previous run of the program. Also, if we redirect the output
to a disk file, sometimes the error does not occur since the program runs
faster, providing fewer opportunities to switch between the threads. The
greatest number of errors occurs when we run the program interactively, writing
the output to the (slow) terminal, but saving the output in a file using the
Unix script program (discussed in detail in Chapter 19 of APUE).
The problem we just discussed, multiple threads
updating a shared variable, is the simplest problem. The solution is to protect
the shared variable with a mutex (which stands for "mutual
exclusion") and access the variable only when we hold the mutex. In terms
of Pthreads, a mutex is a variable of type pthread_mutex_t. We lock and unlock
a mutex using the following two functions:
#include <pthread.h>
int pthread_mutex_lock(pthread_mutex_t * mptr);
int pthread_mutex_unlock(pthread_mutex_t * mptr);
Both return: 0 if OK, positive Exxx value on error
If we try to lock a mutex that is already
locked by some other thread, we are blocked until the mutex is unlocked.
If a mutex variable is statically allocated, we
must initialize it to the constant PTHREAD_MUTEX_INITIALIZER. We will see in
next Section that if we allocate a mutex in shared memory, we must initialize
it at runtime by calling the pthread_mutex_init function.
Some systems (e.g., Solaris) define
PTHREAD_MUTEX_INITIALIZER to be 0, so omitting this initialization is
acceptable, since statically allocated variables are automatically initialized
to 0. But there is no guarantee that this is acceptable and other systems
(e.g., Digital Unix) define the initializer to be nonzero.
Figure3 is a corrected version of Figure 2 that
uses a single mutex to lock the counter between the two threads.
Figure 3
Corrected version of Figure 2 using a mutex to protect the shared variable.
threads/example02.c
1 #include "unpthread.h"
2 #define NLOOP 5000
3 int counter; /*
incremented by threads */
4 pthread_mutex_t counter_mutex =
PTHREAD_MUTEX_INITIALIZER;
5 void *doit(void *);
6 int
7 main(int argc, char **argv)
8 {
9
pthread_t
tidA, tidB;
10
Pthread_create(&tidA,
NULL, &doit, NULL);
11
Pthread_create(&tidB,
NULL, &doit, NULL);
12
/* wait
for both threads to terminate */
13
Pthread_join(tidA,
NULL);
14
Pthread_join(tidB,
NULL);
15
exit(0);
16 }
17 void *
18 doit(void *vptr)
19 {
20 int i,
val;
21
/*
22
* Each
thread fetches, prints, and increments the counter NLOOP times.
23
* The value
of the counter should increase monotonically.
24
*/
25
for (i =
0; i < NLOOP; i++) {
26
Pthread_mutex_lock(&counter_mutex);
27
val =
counter;
28
printf("%d:
%d\n", pthread_self(), val + 1);
29
counter
= val + 1;
30
Pthread_mutex_unlock(&counter_mutex);
31
}
32
return
(NULL);
33 }
We declare a mutex named counter_mutex and this
mutex must be locked by the thread before the thread manipulates the counter
variable. When we run this program, the output is always correct: The value is
incremented monotonically and the final value printed is always 10,000.
How much overhead is involved with mutex
locking? The programs in Figures 2 and 3 were changed to loop 50,000
times and were timed while the output was directed to /dev/null.The difference
in CPU time from the incorrect version with no mutex to the correct version
that used a mutex was 10%. This tells us that mutex locking is not a large
overhead
Related Topics