Chapter: Solid State Drives : Converter / Chopper Fed DC Motor Drive
Discontinuous Armature Current
DISCONTINUOUS ARMATURE CURRENT
The
torque-speed characteristics shown in Fig.2.4b are drawn on the crude assumption
that the armature current is continuous over the whole range of operation. It
is very doubtful that the armature current will be continuous at high values of
the firing angle a, high speed, and low values of torque. In fact, armature
current is discontinuous for these operating conditions. If the armature
current is discontinuous, the no-load speeds will be higher than those shown in
Fig.2.4b, and the speed regulation will be significantly poor in the region of
discontinuous armature current. The motor performance
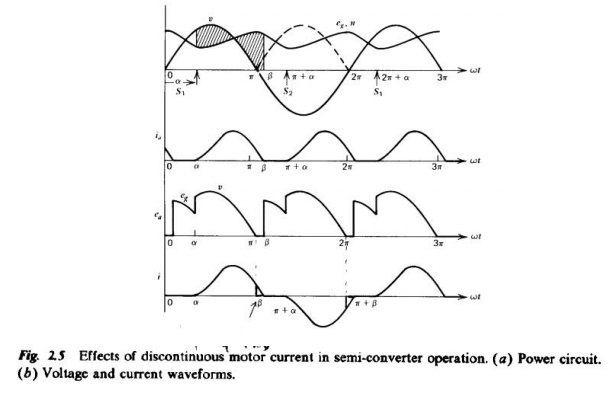
The
waveforms with semi-converter and full-converter with discontinuous armature
current are shown in Fig.2.5 and Fig.2.6, respectively..
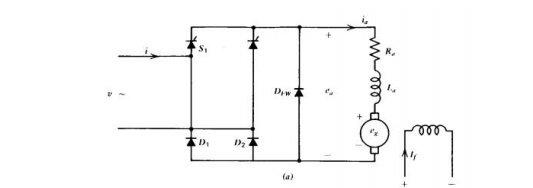
In Fig.
2.5, the motor is connected to the input supply for the period a<wI <71'
through S, and Dz.Beyond 71', the motor terminal is shorted through the free-wheeling
diode DFW' The armature current decays to zero at before the thyristor S2 is
triggered at71' +a, thereby making the armature current discontinuous. During a
to 71' (i.e., the conduction period of the thyristor S,), motor terminal
voltage ea is the same as the supply voltage v. However, during the
motor current free-wheels through DFW and so ea s zero. The motor
coasts and the motor terminal voltage ea is the same as the back voltage
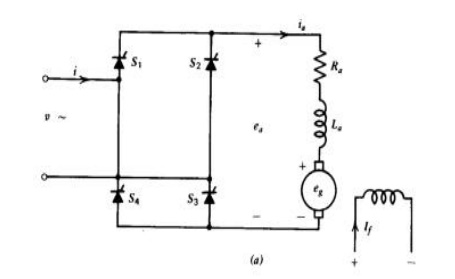
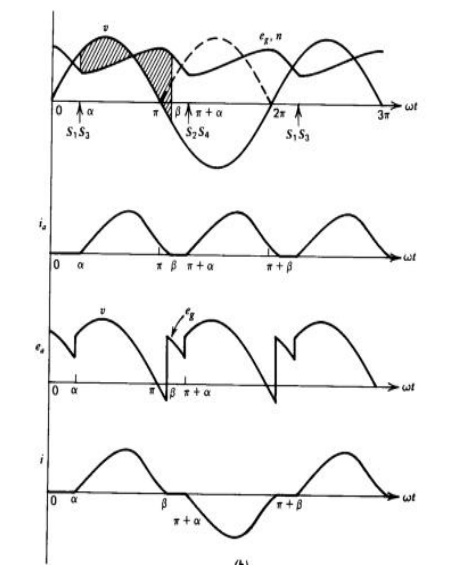
InFig.2.6, the motor is connected to the supply during a<wt<{3 and it
Coasts during {3<wI <71' +a. As long as the motor is connected to the
supply, its terminal voltage is the same as the input supply voltage.
If the
armature current can be assumed to be continuous, the torque-speed
characteristics can be calculated merely from average values ofthe motor
terminal voltage and current. In the discontinuous current mode, these
calculations are cumbersome. The difficulty arises in the calculation of the
average motor terminal voltage Ea, because (called the extinction angle, the
instant at which the thyristor or motor current becomes zero) depends on, the
average speed N, average armature current la' and the firing angle a. A general
approach, valid for both continuous and discontinuous armature current, is
therefore necessary.
Related Topics