Chapter: An Introduction to Parallel Programming : Distributed-Memory Programming with MPI
Collective Communication
COLLECTIVE COMMUNICATION
If we pause for a moment and
think about our trapezoidal rule program, we can find several things that we
might be able to improve on. One of the most obvious is that the “global sum”
after each process has computed its part of the integral. If we hire eight
workers to, say, build a house, we might feel that we weren’t getting our
money’s worth if seven of the workers told the first what to do, and then the seven
collected their pay and went home. But this is very similar to what we’re doing
in our global sum. Each process with rank greater than 0 is “telling process 0
what to do” and then quitting. That is, each process with rank greater than 0
is, in effect, saying “add this number into the total.” Process 0 is doing
nearly all the work in computing the global sum, while the other processes are
doing almost nothing. Sometimes it does happen that this is the best we can do
in a parallel program, but if we imagine that we have eight students, each of
whom has a number, and we want to find the sum of all eight numbers, we can
certainly come up with a more equitable distribution of the work than having
seven of the eight give their numbers to one of the students and having the
first do the addition.
1. Tree-structured communication
As we already saw in Chapter
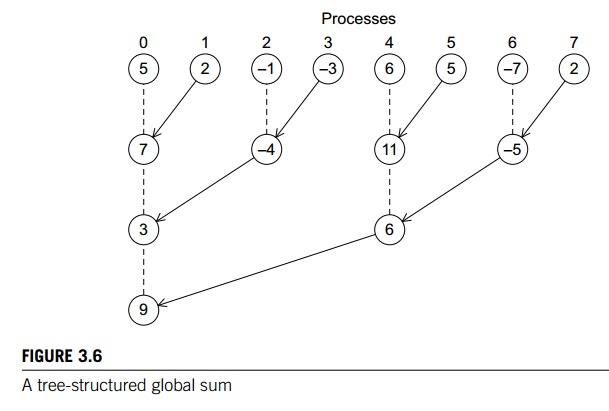
1 we might use a “binary tree structure” like that illustrated in Figure 3.6.
In this diagram, initially students or processes 1, 3, 5, and 7 send their values
to processes 0, 2, 4, and 6, respectively. Then processes 0, 2, 4, and 6 add
the received values to their original values, and the process is repeated
twice:
a. Processes 2 and 6 send their
new values to processes 0 and 4, respectively.
b. Processes 0 and 4 add the received values into their new values.
a. Process 4 sends its newest
value to process 0.
b. Process 0 adds the received value to its newest value.
This solution may not seem
ideal, since half the processes (1, 3, 5, and 7) are doing the same amount of
work that they did in the original scheme. However, if you think about it, the
original scheme required comm_sz-1 = seven receives and seven
adds by process 0, while the new scheme only requires three, and all the other
processes do no more than two receives and adds. Furthermore, the new scheme
has a property by which a lot of the work is done concurrently by different
processes. For example, in the first phase, the receives and adds by processes
0, 2, 4, and 6 can all take place simultaneously. So, if the processes start at
roughly the same time, the total time required to compute the global sum will
be the time required by process 0, that is, three receives and three additions.
We’ve thus reduced the overall time by more than 50%. Furthermore, if we use
more processes, we can do even better. For example, if comm_sz = 1024, then the original
scheme requires process 0 to do 1023 receives and additions, while it can be
shown (Exercise 3.5) that the new scheme requires process 0 to do only 10
receives and additions. This improves the original scheme by more than a factor
of 100!
You may be thinking to yourself, this is all
well and good, but coding this tree-structured global sum looks like it would
take a quite a bit of work, and you’d be right. See Programming Assignment 3.3.
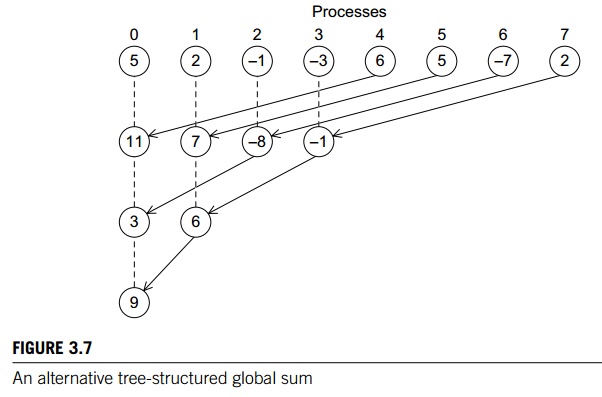
In fact, the problem may be even harder. For example, it’s perfectly feasible
to construct a tree-structured global sum that uses different
“process-pairings.” For example, we might pair 0 and 4, 1 and 5, 2 and 6, and 3
and 7 in the first phase. Then we could pair 0 and 2, and 1 and 3 in the
second, and 0 and 1 in the final. See Figure 3.7. Of course, there are many
other possibilities. How can we decide which is the best? Do we need to code
each alternative and evaluate its performance? If we do, is it possible that
one method works best for “small” trees, while another works best for “large”
trees? Even worse, one approach might work best on system A, while another
might work best on system B.
2. MPI_Reduce
With virtually limitless possibilities, it’s
unreasonable to expect each MPI pro-grammer to write an optimal global-sum
function, so MPI specifically protects programmers against this trap of endless
optimization by requiring that MPI imple-mentations include implementations of
global sums. This places the burden of optimization on the developer of the MPI
implementation, rather than the applica-tion developer. The assumption here is
that the developer of the MPI implementation should know enough about both the
hardware and the system software so that she can make better decisions about
implementation details.
Now, a “global-sum function” will obviously
require communication. However, unlike the MPI_Send-MPI Recv pair, the global-sum function may involve more
than two processes. In fact, in our trapezoidal rule program it will involve
all the processes in MPI_COMM WORLD. In MPI parlance, communication functions that
involve all the processes in a communicator are called collective communications. To distinguish between collective
communications and functions such as MPI_Send and MPI_Recv, MPI_Send
and MPI_Recv
are often called point-to-point communications.
In fact, global sum is just a special case of
an entire class of collective communi-cations. For example, it might happen
that instead of finding the sum of a collection of comm_sz numbers distributed among the processes, we want to find the
maximum or the minimum or the product or any one of many other possibilities.
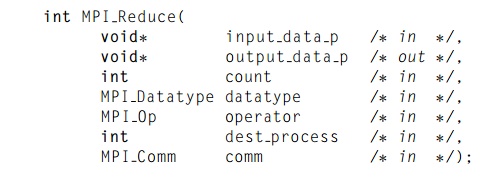
MPI generalized the global-sum function so that any one of these possibilities
can be implemented with a single function:
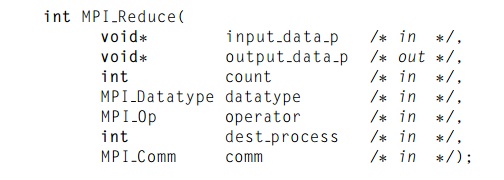
The key to the generalization is the fifth
argument, operator. It has type MPI_Op, which is a predefined MPI type like MPI_Datatype and MPI_Comm. There are a number of predefined values in
this type. See Table 3.2. It’s also possible to define your own operators; for
details, see the MPI-1 Standard [39].
The operator we want is MPI_SUM. Using this value for the operator argument, we can replace the code in Lines 18 through 28 of Program 3.2 with the single function call MPI_Reduce(&local_int, &total_int, 1, MPI_DOUBLE, MPI_SUM, 0, MPI_COMM_WORLD);
One point worth noting is that by using a count argument greater than 1, MPI_Reduce can operate on arrays instead of scalars. The
following code could thus be used to
add a collection of N-dimensional vectors, one per process:
double local_x[N], sum[N];
. . .
MPI_Reduce(local_x, sum, N, MPI_DOUBLE,
MPI_SUM, 0, MPI_COMM_WORLD);
It’s important to remember
that collective communications differ in several ways from point-to-point
communications:
1. All the processes in the communicator must call the
same collective function. For example, a program that attempts to match a
call to MPI_Reduce on one process with a call
to MPI_Recv on another process is
erroneous, and, in all likelihood, the program will hang or crash.
2. The arguments passed by each process to an MPI collective
communication must be “compatible.” For example, if one process passes in 0 as
the dest_process and another passes in 1, then the outcome of a call to
MPI_Reduce is erroneous, and, once again, the program is likely to hang or
crash.
3. The output data p argument is only used on dest_process.
However, all of the processes still need to pass in an actual argument
corresponding to output_data_p, even if it’s just NULL.
4. Point-to-point
communications are matched on the basis of tags and communica-tors. Collective
communications don’t use tags, so they’re matched solely on the basis of the
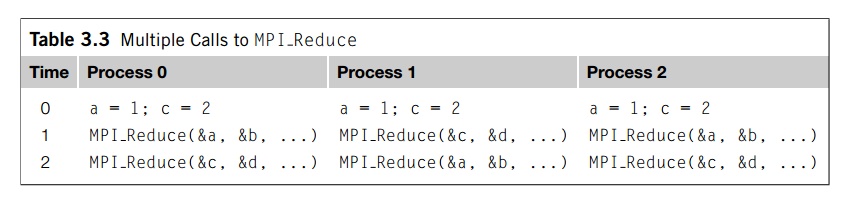
communicator and the order in which they’re called. As an example, consider the
calls to MPI Reduce shown in Table 3.3. Suppose that each pro-cess calls MPI
Reduce with operator MPI_SUM, and destination process 0. At first glance, it
might seem that after the two calls to MPI_Reduce, the value of b will be
three, and the value of d will be six. However, the names of the memory
locations are irrelevant to the matching, of the calls to MPI_Reduce. The order
of the calls will determine the matching, so the value stored in b will be 1 +
2 + 1 = 4, and the value stored in d will be 2 + 1 + 2 = 5.
4. P
A final caveat: it might be
tempting to call MPI_Reduce using the same buffer for
both input and output. For example, if we wanted to form the global sum of x on each process and store the result in x on process 0, we might try calling
MPI_Reduce(&x, &x, 1, MPI_DOUBLE, MPI_SUM,
0, comm);
Table 3.3 Multiple Calls to MPI_Reduce
However, this call is illegal
in MPI, so its result will be unpredictable: it might pro-
duce an incorrect result, it
might cause the program to crash, it might even produce a correct result. It’s
illegal because it involves aliasing of an output argument. Two arguments are
aliased if they refer to the same block of memory, and MPI prohibits aliasing
of arguments if one of them is an output or input/output argument. This is
because the MPI Forum wanted to make the Fortran and C versions of MPI as
sim-ilar as possible, and Fortran prohibits aliasing. In some instances, MPI
provides an alternative construction that effectively avoids this restriction.
See Section 6.1.9 for an example.
4. MPI_Allreduce
In our trapezoidal rule
program, we just print the result, so it’s perfectly natural for only one
process to get the result of the global sum. However, it’s not difficult to
imagine a situation in which all of the processes need the result of a global
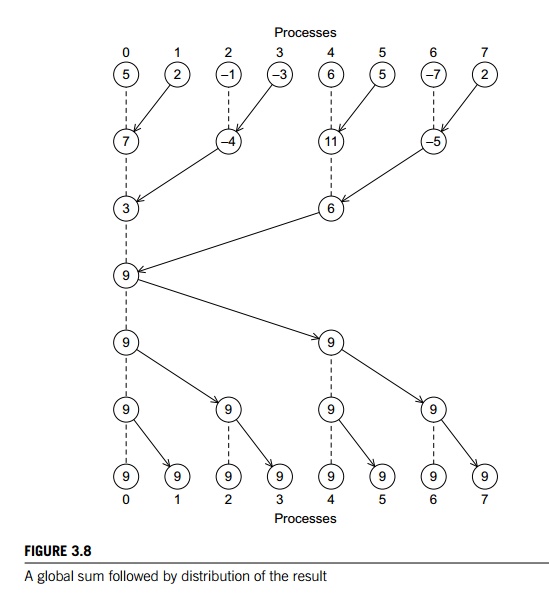
sum in order to complete some larger computation. In this situation, we
encounter some of the same problems we encountered with our original global
sum. For example, if we use a tree to compute a global sum, we might “reverse”
the branches to distribute the global sum (see Figure 3.8). Alternatively, we
might have the processes exchange partial results instead of using one-way
communications. Such a communication pat-tern is sometimes called a butterfly (see Figure 3.9). Once
again, we don’t want to have to decide on which structure to use, or how to
code it for optimal performance. Fortunately, MPI provides a variant of MPI Reduce that will store the result on all the
processes in the communicator:
int MPI_Allreduce(
void* input_data_p
void* output_data_p
int count
MPI_Datatype
datatype
MPI_Op operator
MPI_Comm comm.
The argument list is
identical to that for MPI_Reduce except that there is no dest_process since all the processes
should get the result.
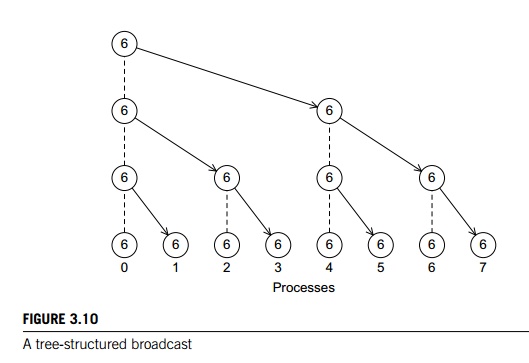
5. Broadcast
If we can improve the performance of the global
sum in our trapezoidal rule program by replacing a loop of receives on process
0 with a tree-structured communication, we ought to be able to do something
similar with the distribution of the input data. In fact, if we simply
“reverse” the communications in the tree-structured global sum in Figure 3.6,
we obtain the tree-structured communication shown in Figure 3.10, and we can
use this structure to distribute the input data. A collective communication in
which data belonging to a single process is sent to all of the processes in the
communicator is called a broadcast, and you’ve probably guessed that MPI provides

a
broadcast function:
int MPI Bcast(
void* data p
/* in/out */,
int count /* in */,
MPI_Datatype datatype /* in */,
int source
proc /* in */,
MPI_Comm comm /* in */);
The process with rank source proc sends the contents of the memory referenced by data p to all the processes in the communicator comm. Program 3.6 shows how to modify the Get input function shown in Program 3.5 so that it uses MPI Bcast instead of MPI Send and MPI Recv.
Program 3.6: A version of Get
input that uses MPI
Bcast
void
Get input(
int my_rank /* in */,
int comm_sz /* in */,
double a_p /
* out */,
double b_p /* out */,
int n_p /* out
*/) {
if
(my_rank == 0) {
printf("Enter
a, b, and nnn");
scanf("%lf
%lf %d", a p, b p, n p);
}
MPI
Bcast(a_p, 1, MPI_DOUBLE, 0, MPI_COMM_WORLD);
MPI
Bcast(b_p, 1, MPI_DOUBLE, 0, MPI_COMM_WORLD);
MPI
Bcast(n_p, 1, MPI_INT, 0, MPI_COMM_WORLD);
} /* Get
input */
Recall that in serial programs, an in/out
argument is one whose value is both used and changed by the function. For MPI Bcast, however, the data p argument is an input argument on the process
with rank source proc and an output argument on the other processes. Thus, when an
argument to a collective communication is labeled in/out, it’s possible that
it’s an input argument on some processes and an output argument on other
processes.
6. Data distributions
Suppose we want to write a
function that computes a vector sum:
x + y =
(x0, x1,….., xn-1) +(.y0, y1, …., yn-1)
=(x0 + y0, x1 + y1,….., xn-1 + yn -1)
=(z0, z1,….., zn-1)
= z
If we implement the vectors
as arrays of, say, doubles, we could implement serial vector addition
with the code shown in Program 3.7.
Program
3.7: A serial implementation of vector addition
void Vector_sum(double x[], double
y[], double z[], int n) {
int i;
for (i
= 0; i < n; i++)
z[i] = x[i] + y[i];
}
/* Vector sum */
How could we implement this using MPI? The work consists of
adding the indi-vidual components of the vectors, so we might specify that the
tasks are just the additions of corresponding components. Then there is no
communication between the tasks, and the problem of parallelizing vector
addition boils down to aggregat-ing the tasks and assigning them to the cores.
If the number of components is n and we have comm sz cores or processes, let’s
assume that n evenly divides comm sz and define local_n = n/comm._sz. Then we
can simply assign blocks of local n consec-utive components to each process.
The four columns on the left of Table 3.4 show an example when n = 12 and
comm._sz = 3. This is often called a block partition of the vector.
An alternative to a block
partition is a cyclic partition. In a cyclic partition, we
assign the components in a round robin fashion. The four columns in the mid-dle
of Table 3.4 show an example when n = 12 and comm._sz = 3. Process 0 gets component 0, process 1
gets component 1, process 2 gets component 2, process 0 gets component 3, and
so on.
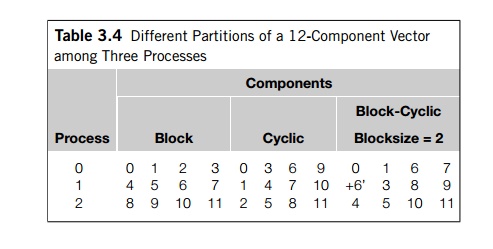
A third alternative is a block-cyclic
partition. The idea here is that instead of using a cyclic distribution of
individual components, we use a cyclic distri-bution of blocks of components, so a
block-cyclic distribution isn’t fully spec-ified until we decide how large the
blocks are. If comm _sz = 3, n = 12, and the blocksize b = 2, an example is shown in the four columns on
the right of Table 3.4.
Once we’ve decided how to
partition the vectors, it’s easy to write a parallel vector addition function:
each process simply adds its assigned components. Furthermore, regardless of
the partition, each process will have local_n components of the vec-tor, and, in order to
save on storage, we can just store these on each process as an array of local_n elements. Thus, each process will execute the
function shown in Program 3.8. Although the names of the variables have been
changed to emphasize the fact that the function is operating on only the
process’ portion of the vector, this function is virtually identical to the
original serial function.
Program
3.8: A parallel implementation of vector addition
void Parallel_vector_sum(
double local_x[] /* in */,
double local_y[] /* in */,
double local_z[] /* out */,
int local_n /* in */) {
int local_i;
for (local_i = 0; local_i < local_n; local i++)
local_z[local i] = local_x[local i] + local_y[local i];
} /* Parallel vector sum */
7. Scatter
Now suppose we want to test our vector addition
function. It would be convenient to be able to read the dimension of the
vectors and then read in the vectors x and y.
We already know how to read in the dimension of
the vectors: process 0 can prompt the user, read in the value, and broadcast
the value to the other processes. We might try something similar with the
vectors: process 0 could read them in and broadcast them to the other
processes. However, this could be very wasteful. If there are 10 processes and
the vectors have 10,000 components, then each process will need to allocate
storage for vectors with 10,000 components, when it is only operating on
subvectors with 1000 components. If, for example, we use a block distribution,
it would be better if process 0 sent only components 1000 to 1999 to process 1,
components 2000 to 2999 to process 2, and so on. Using this approach, processes
1 to 9 would only need to allocate storage for the components they’re actually
using.
Thus, we might try writing a function that
reads in an entire vector that is on process 0 but only sends the needed
components to each of the other processes. For the communication MPI provides
just such a function:
int MPI Scatter(
void send_buf_p /* in */,
int send_count /* in */,
MPI_Datatype send_type /* in */,
void recv_buf_p /* out */,
int recv_count /* in */,
MPI_Datatype recv_type /* in */,
int src_proc /* in */,
MPI_Comm comm /* in */);
If the communicator comm contains comm_sz processes, then MPI_Scatter divides the data referenced by send buf p into comm_sz pieces—the first piece goes to process 0, the
second to process 1, the third to process 2, and so on. For example, suppose
we’re using a block distribution and process 0 has read in all of an n-component vector into send_buf p. Then, process 0 will get the first
local_n =
n=comm_sz components, process 1 will get the next local n components, and so on. Each process should pass its local vector
as the recv buf p argument and the recv_count argument should be local_n. Both send_type and recv_type should be MPI_DOUBLE and src_proc should be 0. Perhaps surprisingly, send_count should also be local n—send
count is the amount of data going to each process; it’s not the amount of data in the memory referred to by send_buf_p. If we use a block distribution and MPI_Scatter, we can read in a vector using the function Read_vector shown in Program 3.9.
One point to note here is that MPI_Scatter sends the first block of send
count objects to process 0, the next block of send_count objects to process 1, and so on, so this approach to reading and
distributing the input vectors will only be suitable if we’re using a block
distribution and n, the number of components in the vectors, is evenly divisible by comm_sz. We’ll discuss a partial solution to dealing with a cyclic or
block-cyclic distribution in Exercise 18. For a complete solution, see. We’ll
look at dealing with the case in which n is not evenly divisible by comm sz in Exercise 3.13.
Program 3.9: A function for reading and distributing a
vector
void
Read vector(
double local_a[] /* out */,
int local_n /* in */,
int n /* in */,
char vec_name[] /* in */,
int my_rank /* in */,
MPI_Comm comm /* in */)
{
double a = NULL;
int
i;
if
(my_rank == 0) {
a
= malloc(n sizeof(double));
printf("Enter
the vector %snn", vec name);
for
(i = 0; i < n; i++)
scanf("%lf",
&a[i]);
MPI_Scatter(a,
local n, MPI DOUBLE, local a, local n,
MPI_DOUBLE,
0, comm);
free(a);
}
else {
MPI
Scatter(a, local_n, MPI_DOUBLE, local_a, local_n,
MPI_DOUBLE,
0, comm);
}
} /*
Read vector */
8. Gather
Of course, our test program will be useless
unless we can see the result of our vector addition, so we need to write a
function for printing out a distributed vector. Our function can collect all of
the components of the vector onto process 0, and then process 0 can print all
of the components. The communication in this function can be carried out by MPI_Gather,
int MPI_Gather(
void send_buf_p /* in */,
int send_count /* in */,
MPI_Datatype send_type /* in */,
void recv_buf_p /* out */,
int recv_count /* in */,
MPI_Datatype recv_type /* in */,
int dest_proc /* in */,
MPI_Comm comm /* in */);
The data stored in the memory referred to by send buf p on process 0 is stored in the first block in recv buf p, the data stored in the memory referred to by send buf p on process 1 is stored in the second block referred to by recv buf p, and so on. So, if we’re using a block distribution, we can
implement our distributed vector print function as shown in Program 3.10. Note
that recv count is the number of data items received from each process, not the total number of data items
received.
Program 3.10: A function for printing a distributed vector
void
Print_vector(
double local_b[] /* in */,
int local_n /* in */,
int n /* in */,
char title[] /* in */,
int my_rank /* in */,
MPI_Comm comm /* in */)
{
double b = NULL;
int
i;
if
(my_rank == 0) {
b
= malloc(n sizeof(double));
MPI_Gather(local_b,
local_n, MPI_DOUBLE, b, local n,
MPI_DOUBLE,
0, comm);
printf("%snn",
title);
for
(i = 0; i < n; i++)
printf("%f
", b[i]);
printf("\n");
free(b);
}
else {
MPI_Gather(local_b,
local_n, MPI_DOUBLE, b, local_n,
MPI_DOUBLE,
0, comm);
}
} /*
Print vector */
The restrictions on the use of MPI Gather are similar to those on the use of MPI
Scatter: our print function will only work correctly
with vectors using a block distribution in which each block has the same
size.
9. Allgather
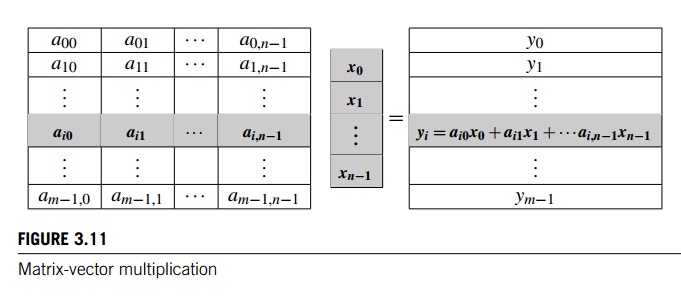
As a final example, let’s look at how we might
write an MPI function that multiplies a matrix by a vector. Recall that if A = (aij) is an mxn matrix and x is a vector with n components, then y = Ax is a vector with m components and we can find the ith component of y by forming the dot product of the ith row of A with x:

See Figure 3.11.
Thus, we might write pseudo-code for serial
matrix multiplication as follows:
/* For each row of A */
for (i = 0; i < m; i++) {
/* Form dot product of ith row with x */
y[i] = 0.0;
for (j = 0; j < n; j++)
y[i] += A[i][j] x[j];
}
In fact, this could be actual C code. However,
there are some peculiarities in the way that C programs deal with
two-dimensional arrays (see Exercise 3.14), so C programmers frequently use
one-dimensional arrays to “simulate” two-dimensional arrays. The most common
way to do this is to list the rows one after another. For example, the
two-dimensional array
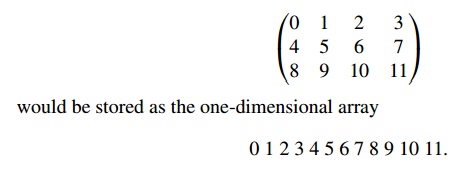
In this example, if we start counting rows and
columns from 0, then the element stored in row 2 and column 1 in the
two-dimensional array (the 9), is located in position 2 x 4 + 1 = 9 in the one-dimensional array. More
generally, if our array has n columns, when we use this scheme, we see that the element stored in
row i and column j is located in position I x n + j in the one-dimensional array. Using this one-dimensional scheme,
we get the C function shown in Program 3.11.
Now let’s see how we might parallelize this
function. An individual task can be the multiplication of an element of A by a component of x and the addition of this product into a component of y. That is, each execution of the statement
y[i] += A[i*n+j]*x[j];
is a task. So we see that if y[i] is assigned to process q, then it would be convenient to also assign row i of A to process q. This suggests that we partition A by rows. We could partition the rows using a block distribution, a cyclic
distribution, or a block-cyclic distribution. In MPI it’s easiest to use a
block distribution, so let’s use a block distribution of the rows of A, and, as usual, assume that comm sz evenly divides m, the number of rows.
We are distributing A by rows so that the computation of y[i] will have all of the needed elements of A, so we should distribute y by blocks. That is, if the ith row of A, is assigned to process q, then the ith component of y should also be assigned to process q.
Program 3.11: Serial matrix-vector multiplication
void
Mat_vect_mult(
double A[] /* in */,
double x[] /* in */,
double y[] /* out */,
int m /* in */,
int n /* in */)
{
int
i, j;
for
(i = 0; i < m; i++) {
y[i]
= 0.0;
for
(j = 0; j < n; j++)
y[i]
+= A[i n+j] x[j];
}
} /* Mat
vect mult */
Now the computation of y[i] involves all the elements in the ith row of A and all the components of x, so we could minimize the amount of
communication by simply assigning all of x to each process. However, in actual
applications—especially when the matrix is square—it’s often the case that a
program using matrix-vector multiplication will execute the multiplication many
times and the result vector y from one multiplication will be the input vector x for the next iteration. In practice, then, we
usually assume that the distribution for x is the same as the distribution for y.
So if x has a block distribution, how can we arrange
that each process has access to all the components of x before we execute the following loop?
for (j = 0; j < n; j++)
y[i] += A[i][j] x[j];
}
In fact, this could be actual C code. However,
there are some peculiarities in the way that C programs deal with
two-dimensional arrays (see Exercise 3.14), so C programmers frequently use
one-dimensional arrays to “simulate” two-dimensional arrays. The most common
way to do this is to list the rows one after another. For example, the
two-dimensional array
In this example, if we start counting rows and
columns from 0, then the element stored in row 2 and column 1 in the
two-dimensional array (the 9), is located in position 2 x 4 + 1 = 9 in the one-dimensional array. More
generally, if our array has n columns, when we use this scheme, we see that the element stored in
row i and column j is located in position I x n + j in the one-dimensional array. Using this one-dimensional scheme,
we get the C function shown in Program 3.11.
Now let’s see how we might parallelize this
function. An individual task can be the multiplication of an element of A by a component of x and the addition of this product into a component of y. That is, each execution of the statement
y[i] += A[i*n+j]*x[j];
is a task. So we see that if y[i] is assigned to process q, then it would be convenient to also assign row i of A to process q. This suggests that we partition A by rows. We could partition the rows using a block distribution, a cyclic
distribution, or a block-cyclic distribution. In MPI it’s easiest to use a
block distribution, so let’s use a block distribution of the rows of A, and, as usual, assume that comm sz evenly divides m, the number of rows.
We are distributing A by rows so that the computation of y[i] will have all of the needed elements of A, so we should distribute y by blocks. That is, if the ith row of A, is assigned to process q, then the ith component of y should also be assigned to process q.
Program 3.11: Serial matrix-vector multiplication
void
Mat_vect_mult(
double A[] /* in */,
double x[] /* in */,
double y[] /* out */,
int m /* in */,
int n /* in */)
{
int
i, j;
for
(i = 0; i < m; i++) {
y[i]
= 0.0;
for
(j = 0; j < n; j++)
y[i]
+= A[i n+j] x[j];
}
} /* Mat
vect mult */
Now the computation of y[i] involves all the elements in the ith row of A and all the components of x, so we could minimize the amount of
communication by simply assigning all of x to each process. However, in actual
applications—especially when the matrix is square—it’s often the case that a
program using matrix-vector multiplication will execute the multiplication many
times and the result vector y from one multiplication will be the input vector x for the next iteration. In practice, then, we
usually assume that the distribution for x is the same as the distribution for y.
So if x has a block distribution, how can we arrange
that each process has access to all the components of x before we execute the following loop?
for (j = 0; j < n; j++)
y[i] += A[i n+j] x[j];
Using the collective communications we’re
already familiar with, we could execute a call to MPI_Gather followed by a call to MPI_Bcast. This would, in all likelihood, involve two
tree-structured communications, and we may be able to do better by using a
butterfly. So, once again, MPI provides a single function:
int MPI_Allgather(
void* send_buf_p / * in
*/,
int send_count /* in */,
MPI_Datatype send_type /* in */,
Void* recv_buf_p /* out */,
int recv_count /* in */,
MPI_Datatype recv_type /* in */,
MPI_Comm comm /* in */);
This function concatenates the contents of each
process’ send_buf_p and stores this in each process’ recv_buf_p. As usual, recv_count is the amount of data being received from each process, so in most cases, recv_count will be the same as send
count.
Program 3.12: An MPI matrix-vector multiplication function
void
Mat_vect_mult(
double local_A[] / in /,
double local_x[] / in /,
double local_y[] / out /,
int local_m / in /,
int n / in /,
int local_n / in /,
MPI_Comm comm / in /) f
double x;
int
local_i, j;
int
local_ok = 1;
x
= malloc(n sizeof(double));
MPI_Allgather(local_x, local_n, MPI_DOUBLE,
x,
local_n, MPI_DOUBLE, comm);
for
(local_i = 0; local_i < local_m; local_i++) {
local_y[local_i] = 0.0;
for
(j = 0; j < n; j++)
local_y[local_i] += local_A[local_i*n+j]*x[j];
}
free(x);
} /* Mat
vect mult */
We can now implement our parallel matrix-vector
multiplication function as shown in Program 3.12. If this function is called
many times, we can improve per-formance by allocating x once in the calling function and passing it as an additional
argument.
Related Topics