Chapter: Signals and Systems : Linear Time Invariant –Continuous Time Systems
Linear Time Invariant -Continuous Time Systems
LINEAR TIME INVARIANT –CONTINUOUS TIME SYSTEMS
System:
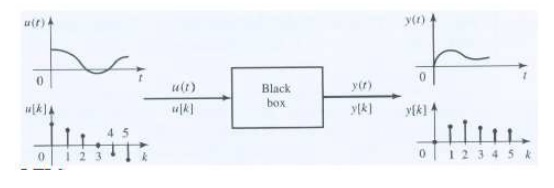
A system
is an operation that transforms input signal x into output signal y.
LTI Systems
Time
Invariant

Meet the
description of many physical systems
They can
be modeled systematically
– Non-LTI
systems typically have no general mathematical procedure to obtain solution
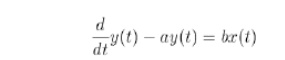
Differential equation:
This is a linear first order differential
equatio n with constant coefficients (assuming a and b are constants)
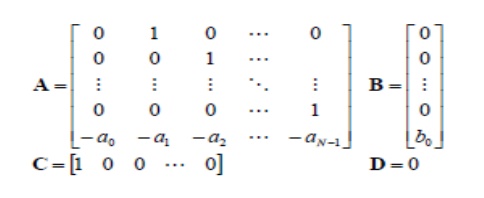
The
general nth order linear DE with constant equations is
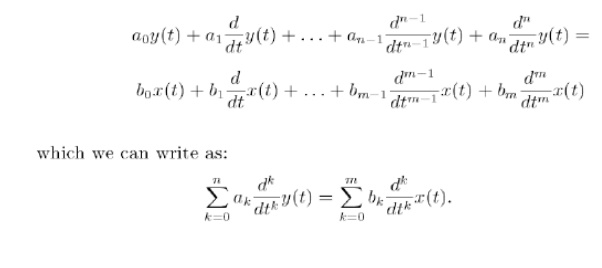
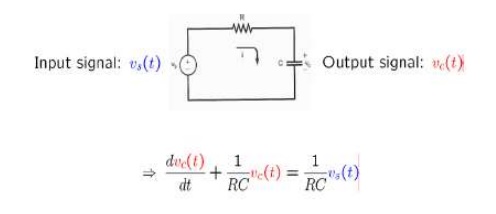
Linear
constant-coefficient differential equations In RC circuit
-
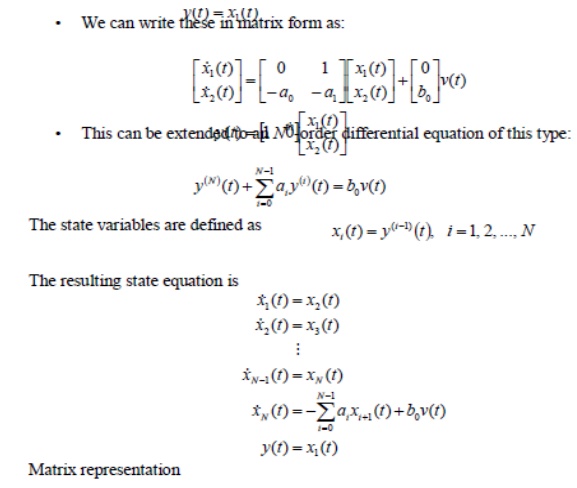
To introduce some of the important ideas concerning
systems specified by linear constant-coefficient differential equations ,let us
consider a first-order differential equations:
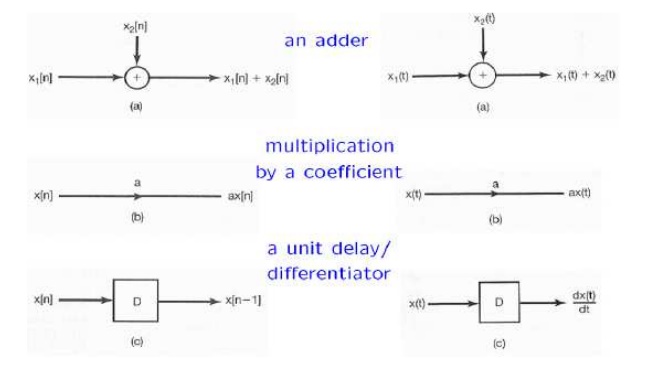
Block diagram representations
Block
diagram representations of first-order systems described by differential and difference
equations
Impulse Response

This
impulse response signal can be used to infer properties about the system’s
structure (LHS of difference equation or unforced solution). The system impulse
response, h(t) completely characterises a linear, time invariant system
Properties of System Impulse
Response
Stable
A system
is stable if the impulse response is absolutely summable
Causal
A system
is causal if h(t)=0 when t<0
Finite/infinite impulse response
The
system has a finite impulse response and hence no dynamics in y(t)
if there exists T>0, such that: h(t)=0
when t>T
Linear
ad(t)=ah(t)
Time invariant d(t-T)
= h(t-T)
Convolution Integral
An
approach (available tool or operation) to describe the input-output
relationship for LTI Systems

In a LTI
system
d(t) #
h(t)
Remember h(t) is T[d(t)]
Unit
impulse function - the impulse response
It is
possible to use h(t) to solve for any input -output relationship
Any input
can be expressed using the unit impulse function
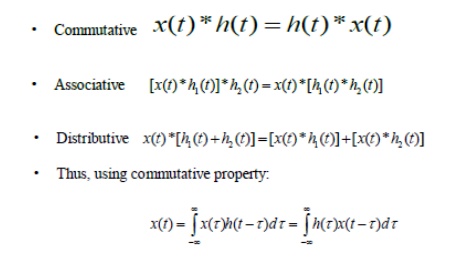
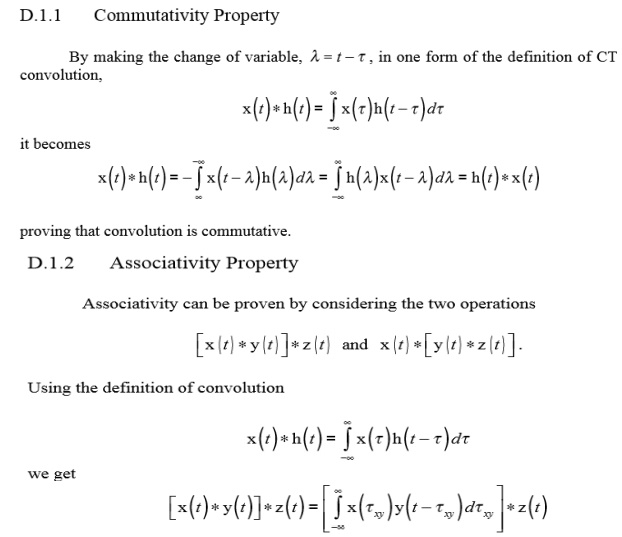
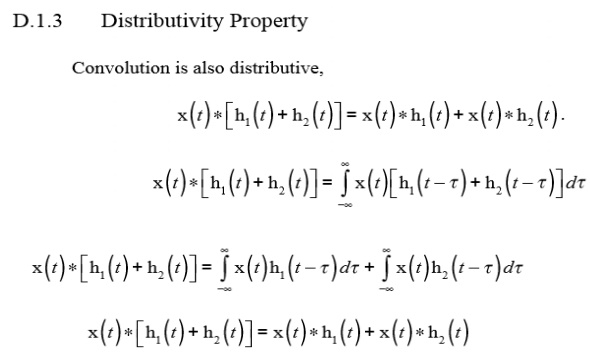
Convolution Integral - Properties
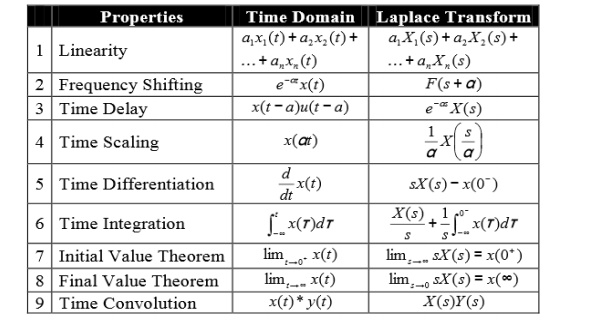
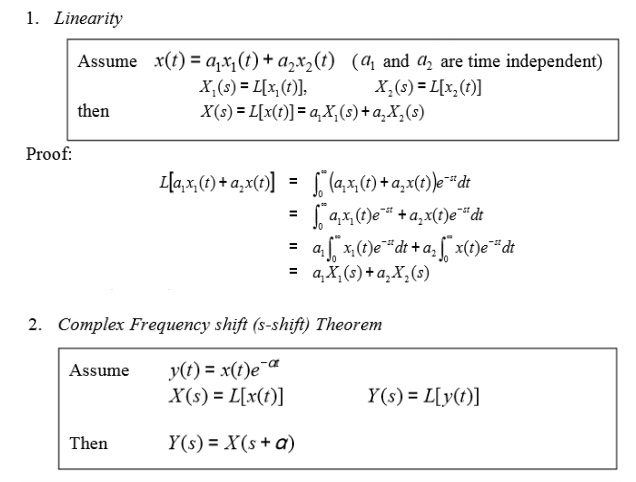
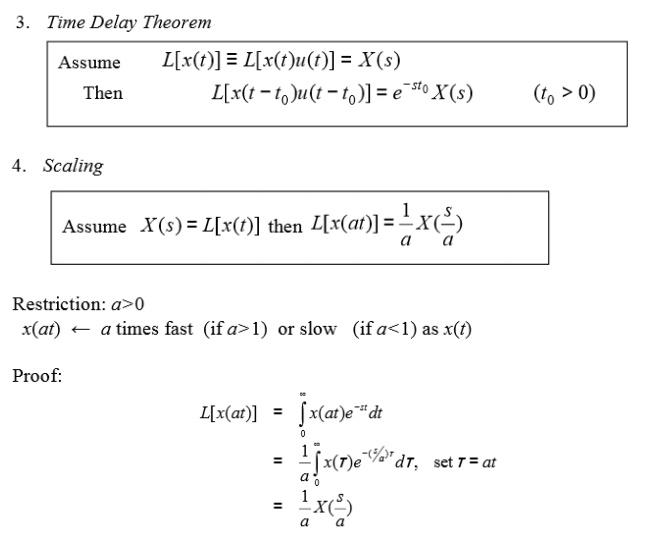
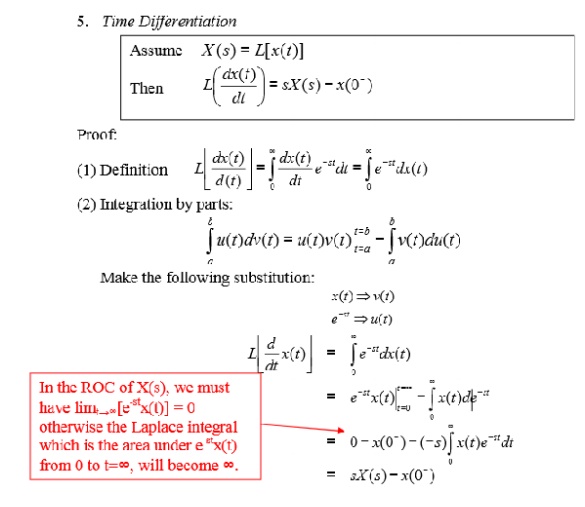
Properties of Laplace Transform:
State variables and Matrix
representation
• State
variables represent a way to describe ALL l inear systems in terms of a common
set of equations involving matrix algebra.
• Many
familiar properties, such as stability, can be derived from this common
representation. It forms the basis for the theoretical analysis of linear
systems.
• State
variables are used extensively in a wide range of engineering problems,
particularly mechanical engineering, and are the foundation of control theory.
• The state
variables often represent internal elements of the system such as voltages
across capacitors and currents across inductors.
• They
account for observable elements of the circu it, such as voltages, and also
account for the initial conditions of the circuit, such as energy stored in
capacitors. This is critical to computing the overall response of the system.
• Matrix
transformations can be used to convert fro m one state variable representation
to the other, so the initial choice of variables is not critical.
• Software
tools such as MATLAB can be used to perform the matrix manipulations required.
• Let us
define the state of the system by an N-element
column vector, x(t):
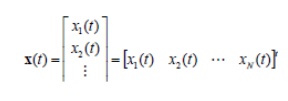
Note that
in this development, v(t) will be the input, y(t)
will be the output, and x(t) is used for the state variables.
• Any
system can be modeled by the following state equations:
• This
system model can handle single input/single output systems, or multiple inputs
and outputs.
• The
equations above can be implemented using the signal flow graph shown to the below
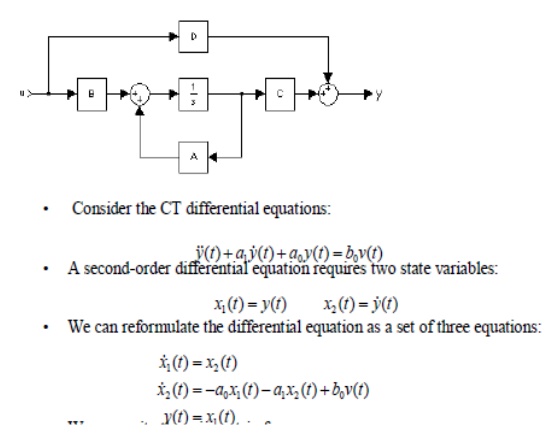
Related Topics