Chapter: Introduction to the Design and Analysis of Algorithms : Limitations of Algorithm Power
P , NP , and NP-Complete Problems
P , NP , and NP-Complete Problems
In the study of the
computational complexity of problems, the first concern of both computer
scientists and computing professionals is whether a given problem can be solved
in polynomial time by some algorithm.
DEFINITION
1 We say that an algorithm solves a problem in polynomial time if its worst-case time
efficiency belongs to O(p(n)) where p(n) is a polynomial of the problem’s input size n. (Note that since we are using big-oh notation
here, problems solvable in, say, logarithmic time are solvable in polynomial
time as well.) Problems that can be solved in polynomial time are called tractable,
and problems that cannot be solved in polynomial time are called intractable.
There are several reasons for drawing the
intractability line in this way. First, the entries of Table 2.1 and their
discussion in Section 2.1 imply that we cannot solve arbitrary instances of
intractable problems in a reasonable amount of time unless such instances are
very small. Second, although there might be a huge difference between the
running times in O(p(n)) for polynomials of
drastically different degrees, there are very few useful polynomial-time
algorithms with the degree of a polynomial higher than three. In addition,
polynomials that bound running times of algorithms do not usually have
extremely large coefficients. Third, polynomial functions possess many
convenient properties; in particular, both the sum and composition of two
polynomials are always polynomials too. Fourth, the choice of this class has
led to a development of an extensive theory called computational complexity,
which seeks to classify problems according to their inherent difficulty. And
according to this theory, a problem’s intractability
remains the same for all
principal models of computations and all reasonable input-encoding schemes for
the problem under consideration.
We just touch on some basic
notions and ideas of complexity theory in this section. If you are interested
in a more formal treatment of this theory, you will have no trouble finding a
wealth of textbooks devoted to the subject (e.g., [Sip05], [Aro09]).
P and NP Problems
Most problems discussed in
this book can be solved in polynomial time by some algorithm. They include
computing the product and the greatest common divisor of two integers, sorting
a list, searching for a key in a list or for a pattern in a text string,
checking connectivity and acyclicity of a graph, and finding a minimum spanning
tree and shortest paths in a weighted graph. (You are invited to add more
examples to this list.) Informally, we can think about problems that can be
solved in polynomial time as the set that computer science theoreticians call P . A more formal definition includes in P only decision problems, which are
problems with yes/no answers.
DEFINITION
2 Class P is a class of decision
problems that can be solved in polynomial time by (deterministic) algorithms.
This class of problems is called polynomial.
The restriction of P to decision problems can be justified by the
following reasons. First, it is sensible to exclude problems not solvable in
polynomial time because of their exponentially large output. Such problems do
arise naturally— e.g., generating subsets of a given set or all the
permutations of n distinct items— but it is
apparent from the outset that they cannot be solved in polynomial time. Second,
many important problems that are not decision problems in their most natural
formulation can be reduced to a series of decision problems that are easier to
study. For example, instead of asking about the minimum number of colors needed
to color the vertices of a graph so that no two adjacent vertices are colored
the same color, we can ask whether there exists such a coloring of the graph’s
vertices with no more than m colors for m = 1, 2, . . . . (The latter is called the m-coloring problem.) The
first value of m in this series for which the
decision problem of m-coloring has a solution
solves the optimization version of the graph-coloring problem as well.
It is natural to wonder
whether every decision problem can be
solved in polynomial time. The answer to this question turns out to be no. In
fact, some decision problems cannot be solved at all by any algorithm. Such
problems are called undecidable, as opposed to decidable problems that can be
solved by an algorithm. A famous example of an undecidable problem was given by
Alan Turing in 1936.1 The problem in question is called the halting problem: given a
computer program and an input to it, determine whether the program will halt on
that input or continue working indefinitely on it.
Here is a surprisingly short
proof of this remarkable fact. By way of contra-diction, assume that A is an algorithm that solves the halting
problem. That is, for any program P and input I,

We can consider program P as an input to itself and use the output of
algorithm A for pair (P , P ) to construct a program Q as follows:
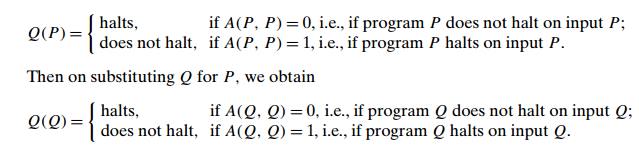
This is a contradiction
because neither of the two outcomes for program Q is possible, which completes the proof.
Are there decidable but
intractable problems? Yes, there are, but the number of known examples is surprisingly small, especially of those that
arise naturally rather than being constructed for the sake of a theoretical
argument.
There are many important
problems, however, for which no polynomial-time algorithm has been found, nor
has the impossibility of such an algorithm been proved. The classic monograph
by M. Garey and D. Johnson [Gar79] contains a list of several hundred such
problems from different areas of computer science, mathematics, and operations
research. Here is just a small sample of some of the best-known problems that
fall into this category:
Hamiltonian circuit problem Determine whether a given
graph has a Hamiltonian circuit—a path that starts and ends at the same
vertex and passes through all the other vertices exactly once.
Traveling salesman problem Find the shortest tour
through n cities with known
positive integer distances between them (find the shortest Hamiltonian circuit
in a complete graph with positive integer weights).
Knapsack problem Find the most valuable subset
of
n items of given positive integer
weights and values that fit into a knapsack of a given positive integer
capacity.
Partition problem Given n positive integers, determine whether it is
possi-ble to partition them into two disjoint subsets with the same sum. Bin-packing
problem Given n items whose sizes are positive rational
num-bers not larger than 1, put them into the smallest number of bins of size
1. Graph-coloring
problem For a given graph, find its chromatic number, which
is the smallest number of colors that need to be assigned to the graph’s
vertices so that no two adjacent vertices are assigned the same color.
Integer linear programming
problem Find the maximum (or minimum) value of a linear function of
several integer-valued variables subject to a finite set of constraints in the
form of linear equalities and inequalities.
Some of these problems are
decision problems. Those that are not have decision-version counterparts (e.g.,
the m-coloring problem for the
graph-coloring problem). What all these problems have in common is an
exponential (or worse) growth of choices, as a function of input size, from
which a solution needs to be found. Note, however, that some problems that also
fall under this umbrella can be solved in polynomial time. For example, the
Eulerian circuit problem—the problem of the existence of a cycle that traverses
all the edges of a given graph exactly once—can be solved in O(n2) time by checking, in addition to the graph’s
connectivity, whether all the graph’s vertices have even degrees. This example
is particularly striking: it is quite counterintuitive to expect that the
problem about cycles traversing all the edges exactly once (Eulerian circuits)
can be so much easier than the seemingly similar problem about cycles visiting
all the vertices exactly once (Hamiltonian circuits).
Another common feature of a
vast majority of decision problems is the fact that although solving such
problems can be computationally difficult, checking whether a proposed solution
actually solves the problem is computationally easy, i.e., it can be done in
polynomial time. (We can think of such a proposed solution as being randomly
generated by somebody leaving us with the task of verifying its validity.) For
example, it is easy to check whether a proposed list of vertices is a
Hamiltonian circuit for a given graph with n vertices. All we need to check is that the
list contains n + 1 vertices of the graph in question, that the
first n vertices are distinct
whereas the last one is the same as the first, and that every consecutive pair
of the list’s vertices is connected by an edge. This general observation about
decision problems has led computer scientists to the notion of a
nondeterministic algorithm.
DEFINITION
3 A nondeterministic algorithm is a two-stage procedure that takes as its input an
instance I of a decision problem and
does the following.
Nondeterministic (“guessing”)
stage: An arbitrary string S is generated that can be
thought of as a candidate solution to the given instance I (but may be complete gibberish as well).
Deterministic (“verification”) stage: A
deterministic algorithm takes both I and S as its input and outputs yes if S represents a solution to instance I. (If S is not a solution to instance I , the algorithm either returns no or is
allowed not to halt at all.)
We say that a
nondeterministic algorithm solves a decision problem if and only if for every
yes instance of the problem it returns yes on some execu-tion. (In other words,
we require a nondeterministic algorithm to be capable of “guessing” a solution
at least once and to be able to verify its validity. And, of course, we do not
want it to ever output a yes answer on an instance for which the answer should
be no.) Finally, a nondeterministic algorithm is said to be nondeterministic
polynomial if the time efficiency of its verification stage is
polynomial.
Now we can define the class
of NP problems.
DEFINITION
4 Class NP is the class of decision
problems that can be solved by nondeterministic polynomial algorithms. This
class of problems is called nonde-terministic polynomial.
Most decision problems are in
NP. First of all, this class includes
all the problems in P :
P ⊆ NP.
This is true because, if a
problem is in P , we can use the
deterministic polynomial-time algorithm that solves it in the
verification-stage of a nondeterministic algo-rithm that simply ignores string S generated in its nondeterministic (“guessing”)
stage. But NP also contains the
Hamiltonian circuit problem, the partition prob-lem, decision versions of the
traveling salesman, the knapsack, graph coloring, and many hundreds of other
difficult combinatorial optimization problems cataloged in [Gar79]. The halting
problem, on the other hand, is among the rare examples of decision problems
that are known not to be in NP.
This leads to the most
important open question of theoretical computer sci-ence: Is P a proper subset of NP, or are these two classes, in fact, the same? We can put this
symbolically as

Note that P = NP
would imply that each of many hundreds of difficult combinatorial decision
problems can be solved by a polynomial-time algorithm, although computer
scientists have failed to find such algorithms despite their per-sistent
efforts over many years. Moreover, many well-known decision problems are known
to be “NP-complete” (see below),
which seems to cast more doubts on the possibility that P = NP.
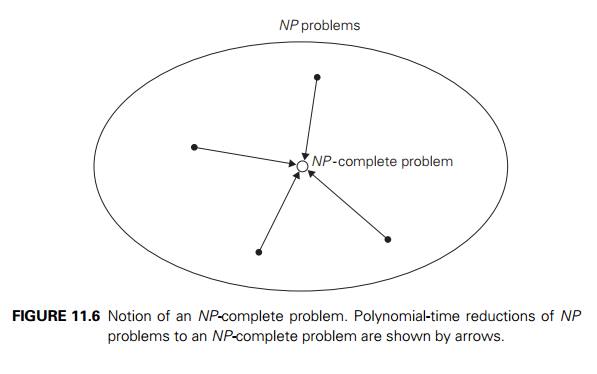
NP -Complete Problems
Informally, an NP-complete problem is a problem in NP that is as difficult as any other
problem in this class because, by definition, any other problem in NP can be reduced to it in polynomial
time (shown symbolically in Figure 11.6).
Here are more formal
definitions of these concepts.
DEFINITION
5 A decision problem D1 is said to be polynomially reducible to a decision problem D2, if there exists a function t that transforms instances of D1 to instances of D2 such that:
t maps all yes instances of D1 to yes instances of D2 and all no instances of D1 to no instances of D2
t is computable by a polynomial
time algorithm
This definition immediately
implies that if a problem D1 is polynomially reducible to
some problem D2 that can be solved in
polynomial time, then problem D1 can also be solved in polynomial time (why?).
DEFINITION
6 A decision problem D is said to be NP-complete if:
it belongs to class NP
every problem in NP is
polynomially reducible to D
The fact that closely related
decision problems are polynomially reducible to each other is not very
surprising. For example, let us prove that the Hamiltonian circuit problem is
polynomially reducible to the decision version of the traveling
11.3 P , NP , and NP-Complete Problems
salesman problem. The latter
can be stated as the existence problem of a Hamil-tonian circuit not longer
than a given positive integer m in a given complete graph
with positive integer weights. We can map a graph G of a given instance of the Hamiltonian circuit
problem to a complete weighted graph G representing an in-stance of the traveling
salesman problem by assigning 1 as the weight to each edge in G and adding an edge of weight 2 between any
pair of nonadjacent vertices in G. As the upper bound m on the Hamiltonian circuit length, we take m = n, where n is the number of vertices in G (and G
). Obviously, this transformation can be done in polynomial time.
Let G be a yes instance of the Hamiltonian circuit
problem. Then G has a Hamiltonian circuit,
and its image in G will have length n, making the image a yes instance of the
decision traveling salesman problem. Conversely, if we have a Hamiltonian
circuit of the length not larger than n in G , then its length must be
exactly n (why?) and hence the circuit
must be made up of edges present in G, making the inverse image of
the yes instance of the decision traveling salesman problem be a yes instance
of the Hamiltonian circuit problem. This completes the proof.
The notion of NP-completeness requires, however,
polynomial reducibility of all problems
in NP, both known and unknown, to the
problem in question. Given the
bewildering variety of decision problems, it is nothing short of amazing that
specific examples of NP-complete
problems have been actually found. Neverthe-less, this mathematical feat was
accomplished independently by Stephen Cook in the United States and Leonid
Levin in the former Soviet Union.2 In his 1971 paper, Cook [Coo71] showed that
the so-called CNF-satisfiability problem is NP-complete. The CNF-satisfiability problem deals with boolean
expressions. Each boolean expression can be represented in conjunctive normal
form, such as the following expression

The CNF-satisfiability
problem asks whether or not one can assign values true and false to
variables of a given boolean expression in its CNF form to make the entire expression true. (It is easy to see that this can be done for the above
formula: if x1 = true, x2 = true, and x3 = false, the entire expression is true.)
Since the Cook-Levin
discovery of the first known NP-complete
problems, computer scientists have found many hundreds, if not thousands, of
other exam-ples. In particular, the well-known problems (or their decision
versions) men-tioned above—Hamiltonian circuit, traveling salesman, partition,
bin packing, and graph coloring—are
all NP-complete. It is known,
however, that if P = NP there must exist NP
problems that neither are in P nor are NP-complete.
For a while, the leading
candidate to be such an example was the problem of determining whether a given
integer is prime or composite. But in an im-portant theoretical breakthrough,
Professor Manindra Agrawal and his students Neeraj Kayal and Nitin Saxena of
the Indian Institute of Technology in Kanpur announced in 2002 a discovery of a
deterministic polynomial-time algorithm for primality testing [Agr04]. Their
algorithm does not solve, however, the related problem of factoring large
composite integers, which lies at the heart of the widely used encryption
method called the RSA algorithm [Riv78].
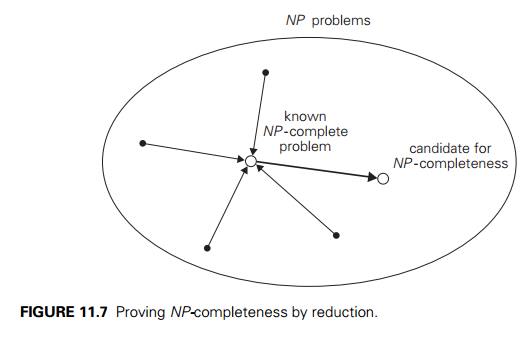
Showing that a decision
problem is NP-complete can be done in
two steps. First, one needs to show that the problem in question is in NP; i.e., a randomly generated string
can be checked in polynomial time to determine whether or not it represents a
solution to the problem. Typically, this step is easy. The second step is to
show that every problem in NP is
reducible to the problem in question in polynomial time. Because of the
transitivity of polynomial reduction, this step can be done by showing that a
known NP-complete problem can be
transformed to the problem in question in polynomial time (see Figure 11.7).
Although such a transformation may need to be quite ingenious, it is
incomparably simpler than proving the existence of a transformation for every
problem in NP. For example, if we
already know that the Hamiltonian circuit problem is NP-complete, its polynomial reducibility to the decision traveling
salesman problem implies that the latter is also NP-complete (after an easy check that the decision traveling
salesman problem is in class NP).
The definition of NP-completeness immediately implies that
if there exists a deterministic polynomial-time algorithm for just one NP-complete problem, then every problem
in NP can be solved in polynomial
time by a deterministic algo-rithm, and hence P = NP.
In other words, finding a polynomial-time algorithm
for one NP-complete problem would mean that there is no qualitative
difference between the complexity of checking a proposed solution and finding
it in polyno-mial time for the vast majority of decision problems of all kinds.
Such implications make most computer scientists believe that P = NP, although nobody has been successful so far in finding a
mathematical proof of this intriguing conjecture. Sur-prisingly, in interviews
with the authors of a book about the lives and discoveries of 15 prominent
computer scientists [Sha98], Cook seemed to be uncertain about the eventual
resolution of this dilemma whereas Levin contended that we should expect the P = NP
outcome.
?
Whatever the eventual answer
to the P = NP
question proves to be, knowing that a problem is NP-complete has important practical implications for today. It
means that faced with a problem known to be NP-complete,
we should probably not aim at gaining fame and fortune3 by designing a polynomial-time
algorithm for solving all its instances. Rather, we should concentrate on
several approaches that seek to alleviate the intractability of such problems.
These approaches are outlined in the next chapter of the book.
Exercises 11.3
A game of chess can be posed as the following decision problem:
given a legal positioning of chess pieces and information about which side is
to move, determine whether that side can win. Is this decision problem
decidable?
A certain problem can be solved by an algorithm whose running time
is in O(nlog2 n). Which of the following assertions is true?
The problem is tractable.
The problem is intractable.
Impossible to tell.
Give examples of the following graphs or explain why such examples
cannot exist.
graph with a Hamiltonian circuit but without an Eulerian circuit
graph with an Eulerian circuit but without a Hamiltonian circuit
graph with both a Hamiltonian circuit and an Eulerian circuit
graph with a cycle that includes all the vertices but with neither
a Hamil-tonian circuit nor an Eulerian circuit
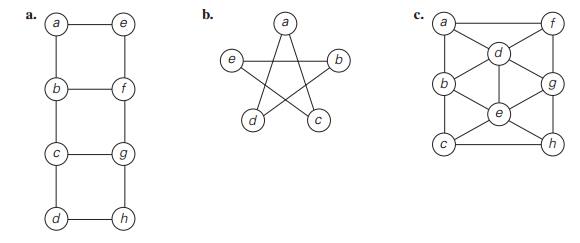
4. For each of the following graphs, find its chromatic number.
Design a polynomial-time algorithm for the graph 2-coloring
problem: deter-mine whether vertices of a given graph can be colored in no more
than two colors so that no two adjacent vertices are colored the same color.
Consider the following brute-force algorithm for solving the
composite num-ber problem: Check successive integers from 2 to n/2 as possible divisors of n. If one of them divides n evenly, return yes (i.e., the number is
composite); if none of them does, return
no. Why does this algorithm not put the problem in class P ?
State the decision version for each of the following problems and
outline a polynomial-time algorithm that verifies whether or not a proposed
solution solves the problem. (You may assume that a proposed solution
represents a legitimate input to your verification algorithm.)
knapsack problemb. bin packing
problem
Show that the partition problem is polynomially reducible to the
decision version of the knapsack problem.
Show that the following three problems are polynomially reducible
to each other.
Determine, for a given graph G = V
, E and a positive integer m ≤ |V |, whether G contains a clique of size m or more. (A clique of size k in a graph is its complete subgraph of k vertices.)
Determine, for a given graph G = V
, E and a positive integer m ≤ |V |, whether there is a vertex cover of size m or less for G. (A vertex cover of size k for a graph G = V , E is a subset V ⊆ V such that |V | = k and, for each edge (u, v) ∈ E, at least one of u and v belongs to V .)
Determine, for a given graph G = V
, E and a positive integer m ≤ |V |, whether G contains an independent set of size m or more. (An independent
set of size k for a graph G = V
, E is a subset V ⊆ V such that |V | = k and for all u, v ∈ V , vertices u and v are not
adjacent in G.)
Determine whether the following problem is NP-complete. Given several sequences of uppercase and lowercase
letters, is it possible to select a letter from each sequence without selecting
both the upper- and lowercase versions of any letter? For example, if the
sequences are Abc, BC, aB, and ac, it is possible to choose A from the first
sequence, B from the second and third, and c from the fourth. An example where
there is no way to make the required selections is given by the four sequences
AB, Ab, aB, and ab. [Kar86]
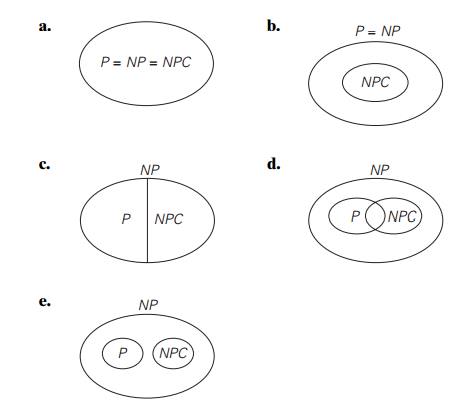
Which of the following
diagrams do not contradict the current state of our knowledge about the
complexity classes P, NP, and NPC (NP-complete
problems)?
King Arthur expects 150 knights for an annual dinner at Camelot. Unfortu-nately,
some of the knights quarrel with each other, and Arthur knows who quarrels with
whom. Arthur wants to seat his guests around a table so that no two quarreling
knights sit next to each other.
Which standard problem can be used to model King Arthur’s task?
Related Topics