Chapter: Operations Research: An Introduction : The Simplex Method and Sensitivity Analysis
Transition from Graphical to Algebraic Solution
TRANSITION
FROM GRAPHICAL TO ALGEBRAIC SOLUTION
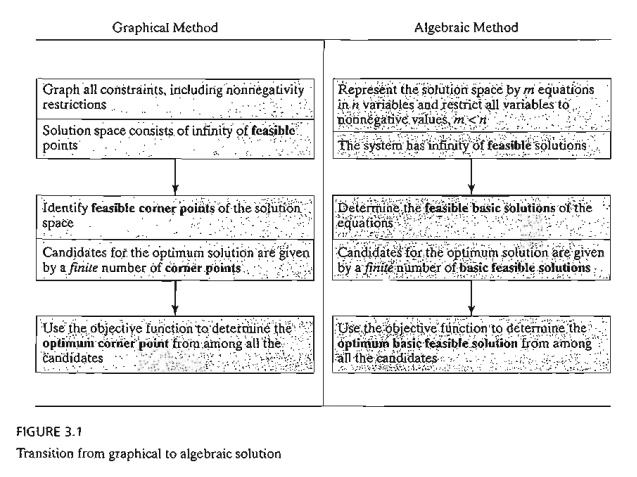
In the graphical method, the solution space is delineated
by the half-spaces representing the constraints, and in the simplex method the
solution space is represented by m
simultaneous linear equations and n
nonnegative variables.
We can
see visually why the graphical solution space has an infinite number of solution
points, but how can we draw a similar conclusion from the algebraic
representa-tion of the solution space? The answer is that in the algebraic
representation the number of equations m
is always less than or equal to the
number of variables n. If m = n, and the equations are consistent, the
system has only one solution; but if m
< n (which
represents
the majority of LPs), then the system of equations, again if consistent, will
yield an infinite number of solutions. To provide a simple illustration, the
equation x = 2 has m = n = 1, and the solution is obviously
unique. But, the equation x + y =
1 has m = 1 and n = 2, and it
yields an infinite number of solutions (any point on the straight line x + y = 1 is a
solution).
Having
shown how the LP solution space is represented algebraically, the candi-dates
for the optimum (i.e., corner points) are determined from the simultaneous
linear equations in the following manner:
Algebraic Determination of Corner Points.
In a set of m X n equations (m < n), if we set n - m variables equal to
zero and then solve the m equations
for the remaining m variables, the
resulting solution, if unique, is called a basic
solution and must correspond to a (feasible or infeasible) corner point of
the solution space. This means that the maximum
number of corner points is

The
following example demonstrates the procedure.
Example 3.2-1
Consider
the following LP with two variables:
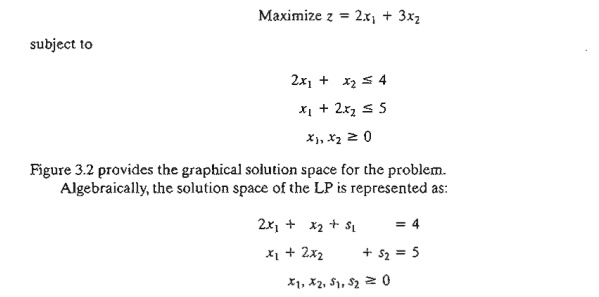
The system has m = 2 equations and n = 4 variables. Thus, according to the given rule, the corner points can be determined algebraically by setting n - m = 4 - 2 =2 variables equal to zero and then solving for the remaining m = 2 variables. For example, if we set xl = 0 and x2 = 0, the equations provide the unique (basic) solution
sl
= 4, s2 = 5
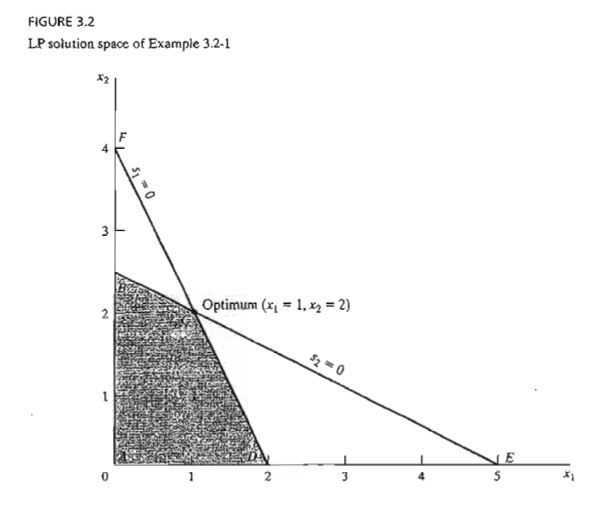
This
solution corresponds to point A in Figure 3.2 (convince yourself
that s1 = 4 and s2 = 5 at
point A). Another
point can be determined by setting s1 = 0 and s2 = 0 and then solving the two
equations
2x1
+ x2 = 4
x1
+ 2x2 = 5
This
yields the basic solution (xl = 1, x2 = 2), which is
point C in Figure 3.2.
You
probably are wondering how one can decide which n - m variables should be
set equal to zero to target a specific corner point. Without the benefit of the
graphical solution (which is available only for two or three variables), we
cannot say which (n - m) zero
variables are associated with which corner point. But that does not prevent us
from enumerating all the corner
points of the solution space. Simply consider all combinations in which n
- m variables are set to zero and
solve the resulting equations. Once done, the optimum solution is the feasible
basic solution (corner point) that yields the best objective value.
In the
present example we have  corner
points. Looking at Figure 3.2, we can immediately spot the four corner points A, B, C, and D. Where,
then, are the remaining two? In fact, points E and F also are corner
points for the problem, but they are infeasible
because they do not satisfy all the constraints. These infeasible corner points
are not candidates for the optimum.
corner
points. Looking at Figure 3.2, we can immediately spot the four corner points A, B, C, and D. Where,
then, are the remaining two? In fact, points E and F also are corner
points for the problem, but they are infeasible
because they do not satisfy all the constraints. These infeasible corner points
are not candidates for the optimum.
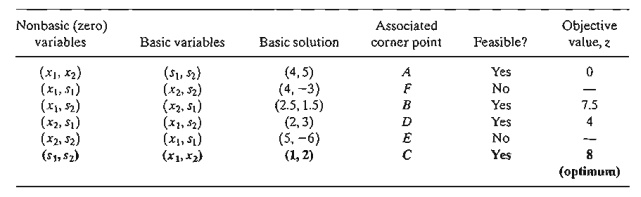
To
summarize the transition from the graphical to the algebraic solution, the zero
n - m variables are known as nonbasic
variables. The remaining m
variables are called basic variables
and their solution (obtained by solving the m
equations) is referred to as basic
solution. The following table provides all the basic and nonbasic solutions
of the current example.
Remarks.
We can see from the computations above that as the problem size increases (that
is, m and n become large), the procedure of enumerating all the corner points
involves prohibitive computations. For example, for m = 10 and n = 20, it is necessary to solve c2010
= 184,756 sets of 10 X 10
equations, a staggering task indeed, particularly when we realize that a (10 X 20)-LP is a small size in most
real-life situations, where hundreds or even thousands of variables and
con-straints are not unusual. The simplex method alleviates this computational
burden dramatically by investigating only a fraction of all possible basic
feasible solutions (corner points) of the solu-tion space. In essence, the
simplex method utilizes an intelligent search procedure that locates the
optimum corner point in an efficient manner.
PROBLEM SET 3.2A
1.
Consider the following LP:
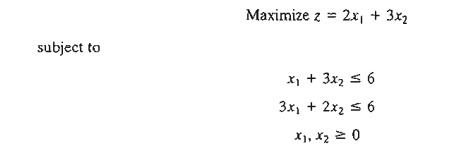
(a)
Express the problem in equation form.
(b)
Determine all the basic solutions of the problem, and classify them as feasible
and infeasible.
*(c) Use
direct substitution in the objective function to determine the optimum basic
feasible solution.
(d) Verify graphically that the solution
obtained in (c) is the optimum LP solution-hence, conclude that the optimum
solution can be determined algebraically by con-sidering the basic feasible
solutions only.
*(e) Show
how the infeasible basic solutions are represented on the graphical solution
space.
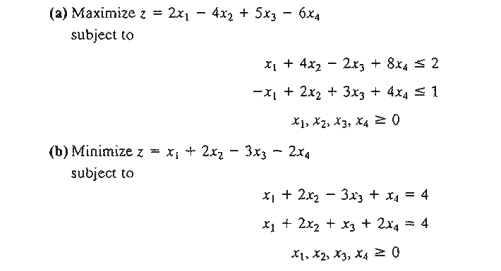
2. Determine
the optimum solution for each of the following LPs by enumerating alI the basic
solutions.
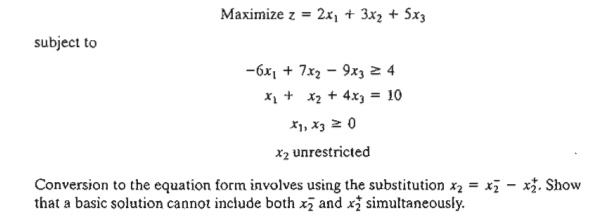
*3. Show algebraically that all the basic
solutions of the following LP are infeasible.
4.
Consider the following LP:
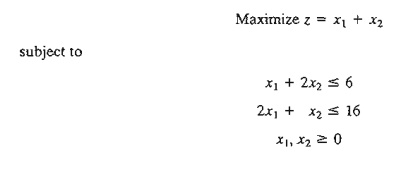
5. Consider the following LP:
a) Determine
all the basic feasible solutions of the problem.
b) Use
direct substitution in the objective function to determine the best basic
solution.
c) Solve the
problem graphically, and verify that the solution obtained in (c) is the
optimum.
Related Topics