Chapter: Embedded and Real Time Systems : Process and Operating Systems
Power Optimization Strategies for Processes
POWER
OPTIMIZATION STRATEGIES FOR PROCESSES:
The RTOS
and system architecture can use static and dynamic power management mechanisms
to help manage the system’s power consumption. A power management policy
[Ben00] is a strategy for determining when to perform certain power management
operations. A power management policy in general examines the state of the
system to determine when to take actions.
However,
the overall strategy embodied in the policy should be designed based on the
characteristics of the static and dynamic power management mechanisms.
Going
into a low-power mode takes time; generally, the more that is shut off, the
longer the delay incurred during restart. Because power-down and power-up are
not free, modes should be changed carefully. Determining when to switch into
and out of a power-up mode requires an analysis of the overall system activity.
·
Avoiding a power-down mode can cost unnecessary
power.
·
Powering down too soon can cause severe performance
penalties.
Re-entering
run mode typically costs a considerable amount of time. A straightforward
method is to power up the system when a request is received. This works as long
as the delay in handling the request is acceptable. A more sophisticated
technique is predictive shutdown.
The goal
is to predict when the next request will be made and to start the system just
before that time, saving the requestor the start-up time. In general, predictive
shutdown techniques are probabilistic they make guesses about activity patterns
based on a probabilistic model of expected behavior. Because they rely on
statistics, they may not always correctly guess the time of the next activity.
This can
cause two types of problems:
·
The requestor may have to wait for an activity
period. In the worst case, the requestor may not make a deadline due to the
delay incurred by system start-up.
·
The system may restart itself when no activity is
imminent. As a result, the system will waste power.
Clearly,
the choice of a good probabilistic model of service requests is important. The
policy mechanism should also not be too complex, since the power it consumes to
make decisions is part of the total system power budget.
Several
predictive techniques are possible. A very simple technique is to use fixed
times. For instance, if the system does not receive inputs during an interval
of length Ton, it shuts down; a
powered-down system waits for a period Toff
before returning to the power-on mode.
The
choice of Toff and Ton must be determined by
experimentation. Srivastava and Eustace [Sri94] found one useful rule for
graphics terminals. They plotted the observed idle time (Toff) of a
graphics terminal versus the immediately preceding active time (Ton).The result was an L-shaped distribution as illustrated in Figure
3.12. In this distribution, the idle period after a long active period is
usually very short, and the length of the idle period after a short active
period is uniformly distributed.
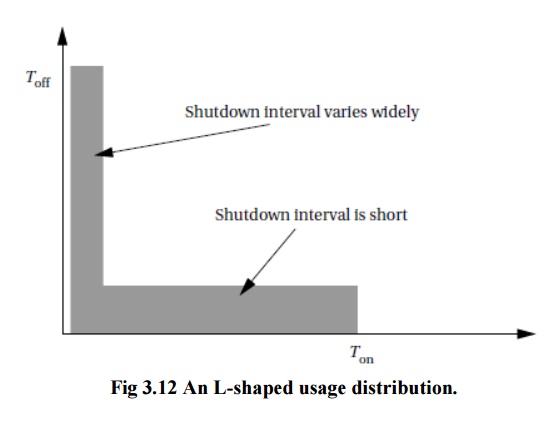
Based on
this distribution, they proposed a shut down threshold that depended on the
length of the last active period—they shut down when the active period length
was below a threshold, putting the system in the vertical portion of the L distribution.
The Advanced Configuration and Power Interface (ACPI) is an open industry standard for power management services. It is designed to be compatible with a wide variety of OSs. It was targeted initially to PCs. The role of ACPI in the system is illustrated in Figure 3.13.
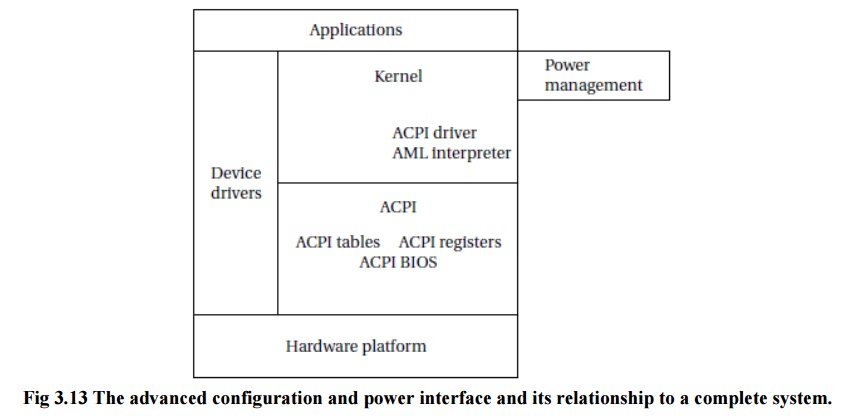
ACPI
provides some basic power management facilities and abstracts the hardware
layer, the OS has its own power management module that determines the policy,
and the OS then uses ACPI to send the required controls to the hardware and to
observe the hardware’s state as input to the power manager.
ACPI
supports the following five basic global power states:
·
G3, the mechanical off state, in which the system
consumes no power.
·
G2, the soft off state, which requires a full OS
reboot to restore the machine to working condition. This state has four
substates:
·
S1, a low wake-up latency state with no loss of
system context;
·
S2, a low wake-up latency state with a loss of CPU
and system cache state;
·
S3, a low wake-up latency state in which all system
state except for main memory is lost; and
·
S4, the lowest-power sleeping state, in which all
devices are turned off.
·
G1, the sleeping state, in which the system appears
to be off and the time required to return to working condition is inversely
proportional to power consumption.
·
G0, the working state, in which the system is fully
usable.
·
The legacy state, in which the system does not
comply with ACPI.
Related Topics