Chapter: Multicore Application Programming For Windows, Linux, and Oracle Solaris : Using POSIX Threads
Creating Threads
Creating
Threads
An
application initially starts with a single thread, which is often referred to
as the main thread or the master thread.
Calling pthread_create() creates a new thread. It takes
the following parameters:
n A pointer
to a pthread_t
structure. The call will return the handle to the thread in this structure.
n A pointer
to a pthread
attributes structure, which can be a null pointer if the default attributes are
to be used. The details of this structure will be discussed later.
n The
address of the routine to be executed.
n A value
or pointer to be passed into the new thread as a parameter.
Listing
5.1 shows how this API call can be used.
1.
www.unix.org
Listing 5.1 Creating a New Thread
#include <pthread.h> #include <stdio.h>
void* thread_code( void * param )
{
printf( "In thread code\n" );
}
int main()
{
pthread_t thread;
pthread_create(
&thread, 0, &thread_code, 0 ); printf(
"In main thread\n" );
}
In this example, the main thread will create a
second thread to execute the routine thread_code(), which will print one message while the main thread prints another.
The call to create the thread has a value of zero
for the attributes, which gives the thread default attributes. The call also
passes the address of a pthread_t variable
for the func-tion to store a handle to the thread.
The return value from the pthread_create() call is zero if the call is successful; otherwise, it returns an error
condition.
Thread
Termination
Child
threads terminate when they complete the routine they were assigned to run. In
Listing 5.2, the child thread will terminate when it completes the routine thread_code(). The
value returned by the routine executed by the child thread can be made available to the main thread
when the main thread calls the routine pthread_join().
The pthread_join() call takes two parameters. The first parameter is the handle of the
thread that is to be waited for. The second parameter is either zero or the
address of a pointer to a void, which
will hold the value returned by the child thread.
The resources consumed by the thread will be
recycled when the main thread calls pthread_join(). If the thread has not yet terminated, this call will wait until the
thread terminates and then free the
assigned resources. Listing 5.2 shows an expanded example where the main thread
waits for the child thread to complete.
Listing 5.2 Creating
a New Thread and Waiting for It to Complete
#include <pthread.h> #include <stdio.h>
void* thread_code( void * param )
{
printf( "In thread code\n" );
}
int
main()
{
pthread_t thread;
pthread_create(
&thread, 0, &thread_code, 0 );
printf( "In main thread\n" );
pthread_join(
thread, 0 );
}
Another way a thread can terminate is to call the
routine pthread_exit(), which
takes a single parameter—either zero or a pointer—to void. This routine does not return and instead terminates the thread. The
parameter passed in to the pthread_exit() call is
returned to the main thread through the pthread_join(). The child threads do not need to explicitly call pthread_exit() because it is implicitly called when the thread exits. Unless the
thread is a detached thread, which will be covered later, the resources used by
the thread are not freed until another thread calls pthread_join(), passing in the handle of the exited thread.
Passing
Data to and from Child Threads
In many
cases, it is important to pass data into the child thread and have the child
thread return status information when it completes. To pass data into a child
thread, it should be cast as a pointer to void and then passed as a parameter
to pthread_create(). It is
critical to realize that the child thread can start executing at any point
after the call, so the pointer must point to something that still exists and
still retains the same value. This rules out passing in pointers to changing
variables as well as pointers to information held on the stack (unless the
stack is certain to exist until after the child thread has read the value).
Listing
5.3 shows an acceptable way of passing the value of a variable into the child
thread. The value is type cast to a void* and then passed as the parameter
to the thread.
Listing 5.3 Passing
a Value into a Created Thread
for ( int i=0; i<10; i++ )
pthread_create(
&thread, 0, &thread_code, (void
*)i );
Listing 5.4 shows an unacceptable way of passing
the value of a variable into the child thread.
Listing 5.4 Erroneous
Way of Passing Data to a New Thread
for ( int i=0; i<10; i++ )
pthread_create(
&thread, 0, &thread_code, (void
*)&i );
The code in Listing 5.4 code is unacceptable for two reasons: First, the
variable i will almost certainly have
changed value before the child thread starts executing, and second, the
variable i is allocated on the stack, and
there is no guarantee that the stack space will even be in scope when the child
thread starts executing.
The child thread will receive the value passed by the main thread as a
parameter, which usually will need to be type cast to an appropriate value.
Listing 5.5 shows an example.
Listing 5.5 Reading
the Parameter Passed to the New Thread
void* child_thread( void* value )
{
int id =
(int)value;
...
}
The
return value from a child thread will be made available to the main thread
through the second parameter of the pthread_join() function call, as shown in
Listing 5.6.
Listing 5.6 Reading
the Return Value of an Exiting Child Thread
#include <pthread.h> #include <stdio.h>
void* child_thread( void * param )
{
int id = (int)param;
printf( "Start thread %i\n", id ); return (void *)id;
}
int main()
{
pthread_t thread[10]; int return_value[10];
for ( int i=0; i<10; i++ )
{
pthread_create(
&thread[i], 0, &child_thread, (void*)i );
}
for ( int i=0; i<10; i++ )
{
pthread_join( thread[i], (void**)&return_value[i] ); printf(
"End thread %i\n", return_value[i] );
}
}
This code will pass a unique number into each child
thread, and then the child thread will return this number as its return code.
The value is then made available to the main thread through the pthread_join() call.
Detached
Threads
The previous discussion focused on joinable
threads, threads that terminate and then wait for the main thread to read their
return value before the resources that they consume are recycled.
It is also possible to create detached threads that do not wait around for another thread to call
pthread_join() before
the resources they consume are recycled. One way to do this is to set the
appropriate attribute in the thread attributes structure; this will be
dis-cussed in the next section. Another way is to call pthread_detach() on an existing thread. Calling pthread_join() on detached threads is an error; they do not need the call, and making
the call will return an error value.
The handle of the detached thread may be recycled
when the thread exits, so any cached version of the handle may no longer refer
to the original thread; hence, care needs to be taken when writing code that
uses detached threads.
Listing 5.7 shows an example of detaching a thread.
The child thread calls pthread_self() to get
its own handle, which it can then use to convert itself into a
detached thread.
Listing 5.7 Detaching
a Thread Using pthread_detach() Call
#include <pthread.h> #include <stdio.h>
void*
child_routine( void * param )
{
int id = (int)param;
printf( "Detach thread %i\n", id ); pthread_detach( pthread_self() );
}
int
main()
{
pthread_t thread[10];
for ( int i=0; i<10; i++ )
{
pthread_create( &thread[i], 0, child_routine, (void*)i );
}
}
Threads can also be created in the detached state. To do this, it is
necessary to pass a set of attributes into the call to pthread_create().
Setting
the Attributes for Pthreads
The attributes for a thread are set when the thread is created. Some
attributes, such as the detached state, can be modified once the thread exists,
but others cannot be changed. To set the initial thread attributes, first
create a thread attributes structure, and then set the appropriate attributes
in that structure, before passing the structure into the pthread_create()
call. Once the attributes have been used to set up
a thread, they can be destroyed with pthread_attr_destroy(). Listing 5.8 shows the basic outline of this.
Listing 5.8 Passing
Attributes to pthread_create
#include <pthread.h>
...
int main()
{
pthread_t thread;
pthread_attr_t
attributes;
pthread_attr_init(
&attributes );
pthread_create( &thread, &attributes, child_routine, 0 );
pthread_attr_destroy(
&attributes );
}
There are various attributes that can be set using
API calls. The most useful ones determine whether the thread is created in the
detached or joinable state, as well as the size of the stack allocated to the
new thread.
A thread can be created as either a detached or a
joinable thread. The default is to create a joinable thread. The code in
Listing 5.9 sets the attributes to create a detached thread.
Listing 5.9 Creating
a Detached Thread
#include <pthread.h> #include <stdio.h>
void* child_routine( void * param )
{
int id = (int)param; printf( "Thread
%i\n", id );
}
int main()
{
pthread_t thread;
pthread_attr_t attributes;
pthread_attr_init( &attributes );
pthread_attr_setdetachstate(
&attributes, PTHREAD_CREATE_DETACHED );
pthread_create( &thread, &attributes, child_routine, 0 );
pthread_attr_destroy( &attributes );
}
The default stack size is dependent upon the
operating system. The code in Listing 5.10 will print out the default stack
size.
Listing 5.10 Reading
the Stack Size Attribute for a New Thread
#include <pthread.h> #include <stdio.h>
int
main()
{
size_t stacksize; pthread_attr_t attributes;
pthread_attr_init( &attributes );
pthread_attr_getstacksize(
&attributes, &stacksize );
printf( "Stack Size = %i\n", stacksize);
pthread_attr_destroy( &attributes );
}
Running it on Ubuntu produces the result shown in
Listing 5.11, indicating that the default stack size is 8MB.
Listing 5.11 Compiling
and Running Code to Show Default Stack Size on Ubuntu
$
gcc stack.c -lpthread
$
./a.out
Stack
Size = 8388608
However, running the same code on Solaris produces
the result shown in Listing 5.12.
Listing 5.12 Compiling
and Running Code to Show Default Stack Size on Solaris
$
cc stack.c
$
./a.out
Stack
Size = 0
Reading the man pages indicates that if zero is set for the stack size,
the Solaris defaults to 1MB for 32-bit code and 2MB for 64-bit code.
Another command that controls stack size is ulimit
-s <stacksize>. On Linux, this command is used
to set the default stack size for both the initial thread created and for
subsequent threads. On Solaris, this command controls only the stack size for
the ini-tial thread. Consequently, to write portable codes, it is best to explicitly
control the size of the stack for any child threads, particularly if the code
places large objects on the stack or uses recursion.
The
obvious question to ask is, why not set the largest stack possible for all
child threads? The answer to this question leads to a discussion on how stacks
are created.
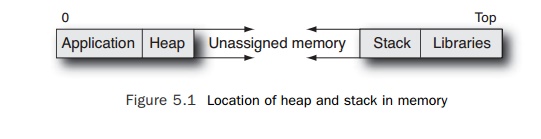
To allow the both the heap (where malloc obtains its memory from) and the stack to grow, the heap is usually
placed after the application at the low end of the addressable memory, and the
stack is usually placed at the upper end of memory, as in Figure 5.1. The heap
grows upward, and the stack can grow downward.
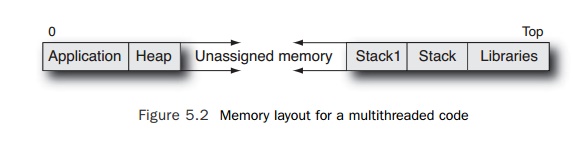
This approach works for a single-threaded application, but each thread
in a multi-threaded application needs its own stack. To do this, the
application must have a limit to the size of the initial stack for the main
thread. Each child thread must also have a limit to its stack size. The
resulting layout in memory is rather like Figure 5.2.
Each thread receives an adjacent block of memory of fixed size for its
stack. There is a finite address space available, so memory used for stack
space is taken from memory that can be used for the heap. For 64-bit
applications, the address space is sufficiently large so that this is not a
problem. For 32-bit applications, it is relatively easy to run out of address
space. If each thread is allocated an 8MB stack, then there can be at most 512
simultaneous threads (512 ∗ 8 MB = entire 4GB address
space). Hence, for some appli-cations, it can be a good idea to assess how much
memory is actually required for the stack of each child thread. The absolute
minimum acceptable memory to provide to a thread is stored in the variable PTHREAD_STACK_MIN. This size would provide no space on the stack for local variables or
making function calls, so it would rarely be used with-out also including some
additional space.
Related Topics